Download
1 / 1
20 likes | 207 Vues
System Integration and Intelligence Improvements for WPI’s UGV - Prometheus Craig DeMello (RBE), Eric Fitting (RBE/CS), Sam King (RBE), Greg McConnell (RBE), Mike Rodriguez (RBE) Advisors: Professor Taskin Padir (ECE/RBE ) and Professor William Michalson (ECE/RBE ). Abstract

E N D
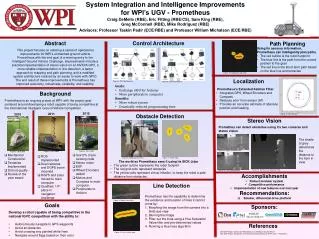
System Integration and Intelligence Improvements for WPI’s UGV - Prometheus Craig DeMello (RBE), Eric Fitting (RBE/CS), Sam King (RBE), Greg McConnell (RBE), Mike Rodriguez (RBE) Advisors: Professor Taskin Padir (ECE/RBE) and Professor William Michalson (ECE/RBE) Abstract This project focuses on realizing a series of operational improvements for WPI’s unmanned ground vehicle Prometheus with the end goal of a winning entry to the Intelligent Ground Vehicle Challenge. Improvements include a practical implementation of stereo vision on an NVIDIA GPU, a more reliable implementation of line detection, a better approach to mapping and path planning, and a modified system architecture realized by an easier to work with GPIO. The end result of these improvements is Prometheus has improved autonomy, robustness, reliability, and usability. • Control Architecture • Goals: • Exchange cRIO for Arduino • Move peripherals to computer • Benefits: • More robust system • Drastically reduced programming time Path Planning • Using its sensory information, Prometheus can intelligently plan paths. • The red outline is the robot footprint • The blue line is the path from the current position to the goal • The red line is the short term path based on the blue line and tentacles Figure 10: Robot path planning Localization Figure 4: 2011 Architecture Figure 5: 2012 Architecture • Prometheus’s Extended Kalman Filter: • Integrates GPS, Wheel Encoders and Compass • Reduces error from sensor drift • Provides an accurate estimate of absolute position and heading Background Prometheus is an ongoing project at WPI, with the project goal centered around developing a robot capable of being competitive at the international Intelligent Ground Vehicle Competition. 2012 2011 2010 Obstacle Detection Figure 11: EKF Results Stereo Vision Promethus can detect obstacles using it’s two cameras and stereo vision The shade of grey determines the distance to the item in view Figure 12: Right stereo camera Figure 3: 2012 robot Figure 2: 2011 robot Figure 1: 2010 robot • Use 5% of pre existing code • Stereo vision • EKF • Wheel Encoders added • Motors and Compass to main computer • Peripherals to Arduino • Mechanical Construction • Tentacles Implemented • Did not qualify • Rookie of the year award • ROS Implemented • Dual cameras and DGPS boom mounted • DGPS and Lidar moved to main computer • Qualified, 13th place in navigation challenge Figure 6: Robot point of view Figure 7: Virtual map • The world as Prometheus sees it using its SICK Lidar • The green outline represents the robot footprint • The red grid cells represent obstacles • The yellow cells represent virtual inflation, to keep the robot a safe distance from obstacles. Figure 14: Stereo vision disparity map Figure 13: Left stereo camera • Accomplishments • Robust modular system • Competitive performance • Implementation of new features over last year • Recommendations: • Smaller, differential drive platform Line Detection Prometheus has the capability to determine the existence and location of lines it cannot cross by: Morphing the image from the camera into a birds eye view Blurring the image Filter out the lines using a Hue Saturation Value filter and pre determined values Running a Hue lines algorithm Figure 8: Robot view of line • Goals • Develop a robot capable of being competitive in the national IGVC competition with the ability to: • Autonomously navigate to GPS waypoints • Avoid all obstacles • Avoid crossing any painted white lines • Navigate around flags based on their color Sponsors: References 2010 MQP Report: Design and Realization of an Intelligent Ground Vehicle 2011 MQP Report: Realization of Performance Advancements for WPI’s UGV – Prometheus Figure 9: Line in virtual map


















