Download
1 / 10
100 likes | 169 Vues
Motivation. We wish to test different trajectories on the Stanford Test Track in order to gain insight into the effects of different trajectory parameters on climbing effectiveness, such as: Foot velocity at impact Detachment strategies Velocity & acceleration during pull stroke.

E N D
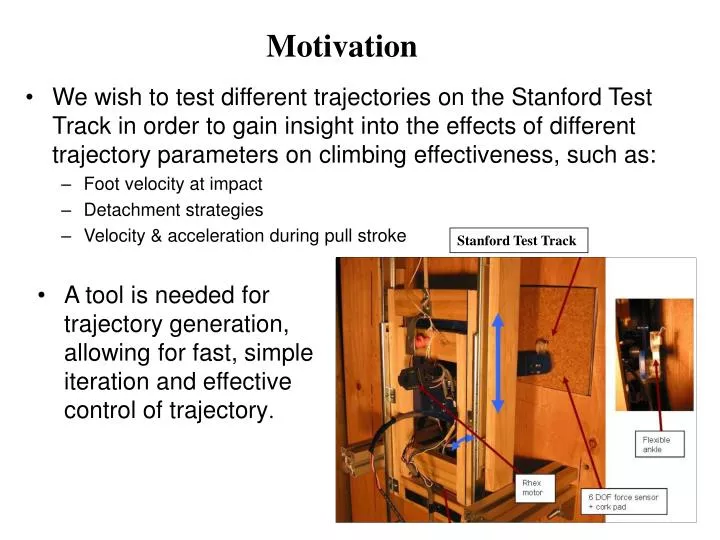
Motivation • We wish to test different trajectories on the Stanford Test Track in order to gain insight into the effects of different trajectory parameters on climbing effectiveness, such as: • Foot velocity at impact • Detachment strategies • Velocity & acceleration during pull stroke Stanford Test Track • A tool is needed for trajectory generation, allowing for fast, simple iteration and effective control of trajectory.
Requirements • Provide a mechanism for user to specify a trajectory in an intuitive way. • Provide visual feedback of actual 3-D trajectory. • Using inverse kinematics, generate the necessary outputs to run this trajectory on hardware. • Stanford Test Track (motors controlling crank and wing angle) • RiSE platform (motors feeding into differential)
Visual Feedback of Actual 3D Trajectory Overall Procedure Matlab Preprocessor • Initial Trajectory Inputs • Possible Input Methods: • Beta Based Input • Time Based Input Output to Test Track or RiSE
b – Arc length along 2-D trajectory f - Wing Angle y – Crank Angle Test Track 3D Trajectory Climbing direction Lifted from wall Touching wall Wing Angle y Crank Angle b=0 Toe Position
y(Crank Angle) Vs b (arc length on Foot trajectory) Foot trajectory Moving forward y (0~2p) b (0 ~ 1) Mapping between y and b y b . . b y t t
* * * * Defining phases based on b Swing engagement disengagement . swing stroke b f Engagement Disengagement b~0.4 f Stroke b~0.85 Climbing direction b
b – Arc length along 2-D trajectory f - Wing Angle y – Crank Angle Foot Detachment: b ~ 0.85 Foot Detachment Foot Contact: b ~ 0.50 Foot Contact Input Method 1 (Beta Based) . User specified b(db/dt) vs b and f vs b • Current system we are using • Specify desired number and location of input points • Approximate functions using Fourier Series Advantage: Intuitive way of specifying point velocity (b) and wing angle (f) at a specific toe position (b) Disadvantage: Difficult to define input values at a specific time (t) .
b – Arc length along 2-D trajectory f - Wing Angle y – Crank Angle Input Method 2 (Time Based) User specified b vs t and f vs t • 4 phases - quintic splines (matched end conditions) Advantages: • Exact Trajectory with explicit constraints on maximum b and b • Control over accelerations in task coordinates Disadvantage: • Difficult to define parameters at a specific toe position (b) . . .
b – Arc length along 2-D trajectory f- Wing Angle y – Crank Angle Mapping Procedure of Current System(library of Matlab functions) • Configuration File • User Inputs • Link lengths • Gear ratios of differential Initial Inputs Test Track Output RiSE Output
b– Arc length along 2-D trajectory f – Wing Angle y – Crank Angle q1 – Rotation angle of Motor 1 q2– Rotation angle of Motor 2 Summary • Matlab preprocessor • Allows for testing different leg trajectories to find better trajectory for climbing • Input: b(db/dt) vs b and f vs b • Mapping Method • Fourier Curve Fit • Inverse Kinematics • Interpolation • Output • Test Track input: y vs t and f vs t • RiSE input: q1 vs t and q2 vs t .