Download
1 / 44
480 likes | 1.01k Vues
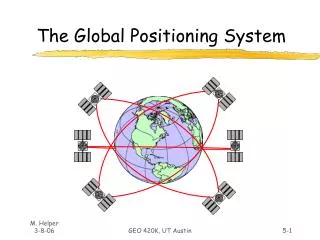
The Global Positioning System. GPS Facts of Note. DoD navigation system First launch on 22 Feb 1978 24 (+/-) Earth-orbiting satellites (SVs) 21 primary, 3 spares Altitude of 20,200 km In 6 orbital planes inclined 55 o to equator, spaced 60 o apart

E N D
The Global Positioning System GEO 420K, UT Austin
GPS Facts of Note • DoD navigation system • First launch on 22 Feb 1978 • 24 (+/-) Earth-orbiting satellites (SVs) • 21 primary, 3 spares • Altitude of 20,200 km • In 6 orbital planes inclined 55o to equator, spaced 60o apart • Orbital period of 12 hrs – not geostationary • 5 to 8 SVs visible at all times anywhere in the world GEO 420K, UT Austin
GPS Segments • Space – Satellites (SVs). • Control – Ground stations track SV orbits and monitor clocks, then update this info. (ephemeris, clock corrections) for each SV, to be broadcast to users (“almanac”). Control Facility at Schriever Air Force Base, CO. • User – GPS receivers convert SV signals into position, velocity and time estimates. GEO 420K, UT Austin
Ranging Techniques • Two-way ranging: “Active” • Electronic Dist. Measuring devices (EDMs) • Radar, Sonar, Lidar • One-way ranging: “Passive” • GPS GEO 420K, UT Austin
Ranging techniques Range • Two-way ranging (EDM) reflector Light beam Range = C x DTime/2 GEO 420K, UT Austin
Ranging techniques “Sphere of position” Range Radio Signal • One-way ranging with GPS Range = C x DTime 1 microsecond error = ~ 300 meters1 nanosecond error = ~ 1 foot GEO 420K, UT Austin
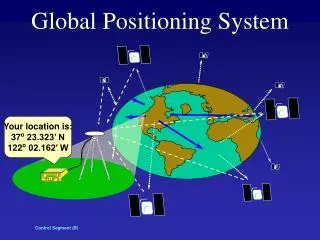
Satellite Positioning Observe DT Orbit Known Determine Geocenter GEO 420K, UT Austin
3-D (X, Y, Z) One-way Ranging • “Trilateration” (~Triangulation) • Intersection of 2 spheres of position yields a circle of location • Intersection of 3 spheres of position yields 2 points of location • One point is position, other is either in space or within earth’s interior • With earth ellipsoid (4th sphere) • Get receiver clock synchronized and X & Y but no Z • Intersection of 4 spheres of position yields XYZ location and clock synchronization GEO 420K, UT Austin
3-D (X, Y, Z) One-way Ranging • Intersection of 3 spheres of position yields 2 points of location; earth is 4th sphere, yielding 1 point. Figures from: www.math.tamu.edu/~dallen/physics/gps/gps.htm GEO 420K, UT Austin
Determine Position by: 1) Downloading almanac (ephemeris info., SV health, etc.) 2) Synchronize receiver clock/measure DT to 4 satellites = pseudorange 3) Account for error sources (see below) by modeling = range 4) Calculating intersection and compute X, Y, Z w.r.t. to center of selected reference ellipsoid 5) Converting to coordinates of interest GEO 420K, UT Austin
How is DT measured? • By using broadcast signals (“codes”) • Code solutions • Less precise, easiest to achieve OR • By using carrier cycles • Carrier-phase solutions • More precise, more difficult to achieve GEO 420K, UT Austin
Broadcast Signals - Codes +1 -1 • Coarse acquisition (C/A) code • Civilian access, least accurate; • Each SV broadcasts unique C/A code • 1023 bits/millisecond, binary, pseudorandom • Receiver generates same codes • Precise or protected (P) code • Authorized users only, more accurate (5-10 m absolute) • Code requires algorithm “seed” that is classified • P code for each satellite reset weekly • Y code • Military use only • Code algorithm is encrypted • Status message – satellite health, status and orbit info GEO 420K, UT Austin
Signal “Carrier” l • Radio waves with following characteristics: • L1: frequency = ~1575 MHz with l = 19 cm • Carries C/A code and status message, modulated at 1 MHz • Carries P code modulated at 10 MHz • L2: frequency = ~1228 MHz with l = 24 cm • Carries P code • Fundamental precision in positioning limited by ability to determine phase of carrier (to ~ 0.01l = 1 or 2 mm) GEO 420K, UT Austin
DT Code solutions Code generated by SV +1 -1 DT +1 Code generated by receiver -1 • Compare offsets in satellite and receiver codes to arrive at DT Pseudorange = C x DT GEO 420K, UT Austin
Sources of Error Satellite Orbit Errors (~2.5 m) SV clock error (~1.5 m)+/- Selective Availability (~30 m) L2 50 km L1 200 km + GDOP (errors x 4-6) (Geometric dilution of precision) Ionospheric Refraction (~ 5 m)(Can correct with L1 & L2 DTs) Tropospheric Delay (~ 0.5 m) Multipathing (~0.5 m) GEO 420K, UT Austin
Summary of Error Sources (m) GEO 420K, UT Austin
Differential GPS (DGPS) • Requires two receivers • One receiver (base) is established at known position • Second receiver (rover) occupies unknown position(s) • Common errors are eliminated by combining data from both receivers • Most accurate results from use of carrier (L1, L2) phase DGPS (<cm) GEO 420K, UT Austin
Differential GPS Positioning Base: known position Rover: unknown position Base station pseudoranges compared to known position; differences are errors common to both receivers. Base computes pseudorange corrections for rover. Apply corrections and solve for position of rover. GEO 420K, UT Austin
Base station DGPS data available from: • On-site base station data combined with rover data • Real-time, via telemetry • Post-processing • “Beacon” antenna to receive broadcast corrections in real-time • US Coast GuardWAAS • Commercial Services • Remote base station data combined with rover data during post-processing • CORS GEO 420K, UT Austin
GPS & DGPS code solution precisions • Selective availability on: • Single receiver GPS precision ~ 100 meters • DGPS precision with very short baseline ~ 1 – 4 meters • Selective availability off (after May 02, 2000): • Single receiver precision see here GEO 420K, UT Austin
Signal “Carrier” l • Radio waves with following characteristics: • L1: frequency = ~1575 MHz with l = 19 cm • Carries C/A code and status message, modulated at 1 MHz • Carries P code modulated at 10 MHz • L2: frequency = ~1228 MHz with l = 24 cm • Carries P code • Fundamental precision in positioning limited by ability to determine phase of carrier (to ~ 0.01l = 1 or 2 mm) GEO 420K, UT Austin
DGPS Carrier-Phase Solutions • Use 19 cm wave as ruler to measure # of cycles (& phase of cycle) from each satellite • Ruler is not labeled; track phase from several SVs and find intersection(s) of coincident phases. • Know approx. position of antenna from code-phase DGPS; eliminates ambiguity. • Passage of waves and motion of SVs need to be known • Cycle Slips Sub-centimeter precision possible GEO 420K, UT Austin
Types of Carrier-phase solutions • Static: “Rover” is stationary and collects data for several hours • Rapid Static: Rover is stationary and collects for 5-20 minutes • Kinematic: Rover collects on the move GEO 420K, UT Austin
Accuracy of Code vs. Phase Solutions GEO 420K, UT Austin
GPS Equipment Hand-helds $100-$450 – Navigation instruments For survey apps.: Garmin Magellan GPS for PDAs • Way Points collection • Manual entry into GIS, no attribute info. stored • “Differential ready” but no post-processing +/- ~15 meters +/- ~3 meters with WAAS GEO 420K, UT Austin
GPS Equipment Geodetic-quality Instruments • Trimble • Ashtech • Sokkia • Others Cm – mm in x, y and z Stationary Antenna Large memory for continuous data collection GEO 420K, UT Austin
Recent Developments • Hand-held equipment – Field GIS • WAAS, LAAS • NDGPS • European Union Galileo System • Glonass (presently 9 SVs; 24 by 2007) • Chinese Beidou System GEO 420K, UT Austin
Recent Developments • Touch-screen GIS mapping tablets with integrated GPS • Hand-helds with touch screens • PDA GPS & GIS - ArcPad GEO 420K, UT Austin
Recent Developments • FAA WAAS and DGPS WAAS receivers • Commissioning of WAAS in December 2003 • LAAS by late 2006? GEO 420K, UT Austin
Geographic Datums & Coordinates What is the shape of the earth? Why is it relevant? GEO 420K, UT Austin
The “Figure” of the Earth • Models • Sphere with radius of ~6378 km • Ellipsoid (or Spheroid) with equatorial radius (major axis) of ~6378 km and polar radius (minor axis) of ~6357 km • Difference of ~21 km is usually expressed as the “flattening” (f) ratio of the ellipsoid: • f = difference/major axis = ~1/300 for earth GEO 420K, UT Austin
Ellipsoid / Spheroid • Rotate an ellipse around an axis (c.f. Uniaxial indicatrix of optical mineralogy) Rotation axis a = Major axis b = Minor axis X, Y, Z = Reference frame GEO 420K, UT Austin
Standard Earth Ellipsoids GEO 420K, UT Austin
Horizontal Datums Datum = ellipse and axis of rotation. Common North American datums: • NAD27 (1927 North American Datum) • Clarke (1866) ellipsoid, non-geocentric axis of rotation* • NAD83 (1983 North American Datum) • GRS80 ellipsoid, non-geocentric axis of rotation • WGS84 (1984 World Geodetic System) • GRS80 ellipsoid, nearly identical to NAD83 • Other datums in use globally GEO 420K, UT Austin
Laying the earth flat • How? • Projections – transformation of curved earth to a flat map; systematic rendering of the lat. & lon. graticule to rectangular coordinate system. Scale1: 42,000,000 Scale Factor0.9996 (for specific line(s)) Earth Globe Map Peters Projection Globe distanceEarth distance Map distanceGlobe distance GEO 420K, UT Austin
Laying the earth flat • Systematic rendering of Lat. (f) & Lon. (l) to rectangular (x, y) coordinates: y 0, 0 x Geographic Coordinates(f, l) Projected Coordinates(x, y) Map Projection GEO 420K, UT Austin
Rectangular Coordinate Systems • Universal Transverse Mercator (UTM) • US military developed; Global cartesian reference system. • State Plane Coordinate System (SPCS) • Coordinates specific to states; used for property definitions. • Public Land Survey System (PLS) • National system once used for property description • no common datum or axes, units in miles or fractional miles. GEO 420K, UT Austin
UTM Coordinate System (Y) (x) • Cylinder is rotated about vertical axis in 6o increments to define 60 separate UTM “zones”. Rotate in 6o increments UTM Zone is 6o wide GEO 420K, UT Austin
UTM Coordinate System • Zone boundaries are parallel to meridians. • Zones numbered from 180o (begins zone 1) eastward and extend from 80o S to 84o N. UTM Zones 20 9 10 19 11 12 18 13 14 15 16 17 GEO 420K, UT Austin
UTM Coordinate System (Y) (x) • For each zone, the Central Meridian is the y-axis, the equator the x-axis • Central meridian of each zone in US has a scale factor of 0.9996 (max. distortion). GEO 420K, UT Austin
UTM Coordinate System y N. Hemisphereorigin is(500,000m, 0) x x S. Hemisphereorigin is(500,000m, 10,000,000m) y • Locations are given in meters from central meridian (Easting) and equator (Northing). • (-) Eastings avoided by giving X value of 500,000 m (“false easting”) to the Central Meridian • In S. hemisphere, equator is given “false northing” of 10,000,000 m to avoid (-) Northings. GEO 420K, UT Austin
UTM Coordinate System Y 99oW Zone 14 Austin Y = 3,000,000 mN Central Meridian(X = 500,000 m) UTM Coordinates for central Austin: Zone 14 621,000 mE, 3,350,000 mN GEO 420K, UT Austin
State Plane Coordinate System (SPCS) • Developed in 1930’s to provide states a reference system that was tied to national datum (NAD27); units in feet. • Updated to NAD83, units in meters; some maps still show SPCS NAD27 coordinates. • Larger states divided into several zones. • X, Y coordinates are given relative to origin outside of zone; false eastings and northings different for each zone. GEO 420K, UT Austin
Texas NAD83 SPCS Austin:Central Zone ~ 944,000mE~ 3,077,000mN Y Austin X GEO 420K, UT Austin