Advanced Techniques in Structured Light Imaging for Computer Vision
380 likes | 397 Vues
Explore structured light and active ranging methods in geometric computer vision. Learn about techniques, issues, and applications in depth imaging.

Advanced Techniques in Structured Light Imaging for Computer Vision
E N D
Presentation Transcript
Today’s class • unstructured light • structured light • time-of-flight (some slides from Szymon Rusinkiewicz, Brian Curless)
Unstructured light project texture to disambiguate stereo
Space-time stereo Davis, Ramamoothi, Rusinkiewicz, CVPR’03
Space-time stereo Davis, Ramamoothi, Rusinkiewicz, CVPR’03
Space-time stereo Zhang, Curless and Seitz, CVPR’03
Space-time stereo Zhang, Curless and Seitz, CVPR’03 • results
Triangulation: Moving theCamera and Illumination • Moving independently leads to problems with focus, resolution • Most scanners mount camera and light source rigidly, move them as a unit
Triangulation: Moving theCamera and Illumination (Rioux et al. 87)
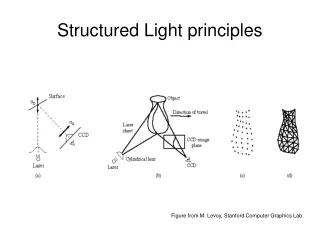
Laser Camera Triangulation: Extending to 3D • Possibility #1: add another mirror (flying spot) • Possibility #2: project a stripe, not a dot Object
Triangulation Scanner Issues • Accuracy proportional to working volume(typical is ~1000:1) • Scales down to small working volume(e.g. 5 cm. working volume, 50 m. accuracy) • Does not scale up (baseline too large…) • Two-line-of-sight problem (shadowing from either camera or laser) • Triangulation angle: non-uniform resolution if too small, shadowing if too big (useful range: 15-30)
Triangulation Scanner Issues • Material properties (dark, specular) • Subsurface scattering • Laser speckle • Edge curl • Texture embossing
Space-time analysis Curless ‘95
Space-time analysis Curless ‘95
Multi-Stripe Triangulation • To go faster, project multiple stripes • But which stripe is which? • Answer #1: assume surface continuity e.g. Eyetronics’ ShapeCam
Real-time system Koninckx and Van Gool
Real-time scanning system Rusinckiewicz et al. Siggraph02 SzymonRusinckiewicz talk Friday 20/11 at 11:15 in ETZ E9 (in context of PhD defense Thibaut Weise, also 20/11 at 15:00 in ETF C109)
In-hand modeling Weise et al. CVPR08
Multi-Stripe Triangulation • To go faster, project multiple stripes • But which stripe is which? • Answer #2: colored stripes (or dots)
Multi-Stripe Triangulation • To go faster, project multiple stripes • But which stripe is which? • Answer #3: time-coded stripes
Time-Coded Light Patterns • Assign each stripe a unique illumination codeover time [Posdamer 82] Time Space
An idea for a project? Bouget and Perona, ICCV’98
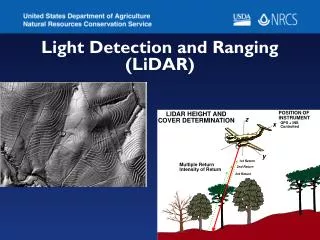
Pulsed Time of Flight • Basic idea: send out pulse of light (usually laser), time how long it takes to return
Pulsed Time of Flight • Advantages: • Large working volume (up to 100 m.) • Disadvantages: • Not-so-great accuracy (at best ~5 mm.) • Requires getting timing to ~30 picoseconds • Does not scale with working volume • Often used for scanning buildings, rooms, archeological sites, etc.
Depth cameras 2D array of time-of-flight sensors e.g. Canesta’s CMOS 3D sensor jitter too big on single measurement, but averages out on many (10,000 measurements100x improvement)
Depth cameras 3DV’s Z-cam • Superfast shutter + standard CCD • cut light off while pulse is coming back, then I~Z • but I~albedo (use unshuttered reference view)
AM Modulation Time of Flight • Modulate a laser at frequencym ,it returns with a phase shift • Note the ambiguity in the measured phase! Range ambiguity of 1/2mn
AM Modulation Time of Flight • Accuracy / working volume tradeoff(e.g., noise ~ 1/500 working volume) • In practice, often used for room-sized environments (cheaper, more accurate than pulsed time of flight)
Depth from focus/defocus Nayar’95