Download
1 / 9
90 likes | 211 Vues
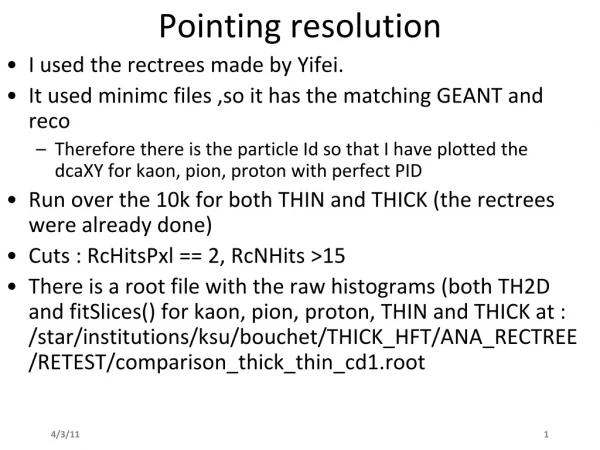
This document addresses the challenges and solutions concerning the periapse pointing mode for the IUVS (Imaging Ultraviolet Spectrograph) instrument on a Mars spacecraft. Initial findings indicated that the default (+Z Sun/Y Velocity) configuration allowed desired pointing only 10% of the time. The discussion led to potential new gimbal configurations, GNC modes, and the evaluation of various trade options. The recommendation is to baseline the Y-velocity/X-nadir configuration for improved performance during periapse passes and facilitate necessary limb scans without introducing new pointing modes.

E N D
Periapse Pointing Options Mark Johnson, et. al. LMSSC This document contains, or may contain, technical data as defined in the International Traffic In Arms Regulation (ITAR). Export of this material is, or may be, restricted by the Arms Export Control Act (Title 22, U.S.C. 2751, at seq.) and is not to be exported to foreign persons without appropriate export authority. EXPORT CONTROLLED INFORMATION – USG Authorization Required Prior to Export
Issue • Recently, it was discovered that the baseline periapsis pointing mode (+Z Sun/ Y Velocity) would only allow IUVS to be pointed in its desired direction (within 1 deg) for 10% of all periapse passes • NGIMS pointing was satisfied 100% of the time • IUVS concern is that either the bright limb of Mars will enter its FOV or that the FOV will be aimed at space and miss the desired 100-500 km altitude range • STATIC was also impacted because nadir was not always present in FOV • Spacecraft and instrument team members met at LASP on April 1, 2010 to discuss the issue and identify potential solutions • IUVS Limb Scans are Level 1 science and must be accommodated • Minimum success criteria not previously known • IUVS has now stated 75% of periapse passes must meet pointing requirements • The entire periapse pass must be achievable • STATIC pointing requirements will be satisfied automatically if IUVS requirements are met • Minimum success criteria not independently specified, assuming same levels as IUVS EXPORT CONTROLLED INFORMATION – USG Authorization Required Prior to Export
Issue (continued) • The fundamental problem is that the spacecraft/APP pointing scenario has many constraints and few degrees-of-freedom to solve them • S/C planned to point +Z axis to Sun • APP +i axis pointed along velocity vector (NGIMS) • APP -k axis pointed along orbit normal (IUVS) • With S/C +Z aligned with Sun, there is one degree-of-freedom left on the S/C: clocking around the Z axis • For any given point in time, there is one solution for the clock angle that (along with the APP degrees-of-freedom) allows all three constraints to be satisfied • Thus, for continuous pointing throughout the periapse pass, the clock angle must be continually varied • This pointing mode does not presently exist in FSW • High S/C and APP rates will exist near singularities (sun-velocity) and thus will not always be usable Inner gimbal rotates parallel to Y-axis Outer gimbal rotates about j-axis EXPORT CONTROLLED INFORMATION – USG Authorization Required Prior to Export
Options and Decisions • Several options were identified that can solve the problem • Add 3rdgimbal: REJECTED due to mass, cost, and complexity • Change gimbal ordering: REJECTED: just moves the problem somewhere else in the orbit • Implement new GNC mode to compute new attitudes required to solve S/C and APP constraints: Tentatively REJECTED due to cost • Utilize Deep Dip attitude (Velocity/Nadir ACS mode: -Z axis to velocity, +X constrained to nadir): Interim BASELINE for near-term due to its use elsewhere in the mission – NOTE: This mode was only used as a baseline until the conclusion of this trade study. See “Recommendation” slide for new baseline • Needs additional analysis by GNC, power, thermal • Fly solar arrays along velocity (two options) • Velocity/Nadir ACS mode (+/- Y to velocity, +X constrained to nadir): ACCEPTED for study • Allows additional capability by IUVS to rotate APP as limb approaches • Could simplify IUVS design • Orientation not used elsewhere, therefore needs analysis by GNC, power, thermal • Velocity/Sun ACS mode (+/- Y to velocity, +Z constrained to Sun): ACCEPTED for study • Allows same improvement in IUVS capability as above • Should provide improvement in power collection vs above • New ACS mode (no new geometric algorithm, but needs new mode definition and management) • Orientation not used elsewhere, therefore needs analysis by GNC, power, thermal EXPORT CONTROLLED INFORMATION – USG Authorization Required Prior to Export
Trade Study • Consider: • Spacecraft pointing • ACS mode • APP mode • Science impacts • NGIMS FOV • Science opportunities • e.g. IUVS limb scan, STATIC ram-horizontal • Spacecraft impacts • Power/EPS • Thermal • ? • Other operations impacts • e.g. ground analysis
TRADE STUDY: Mode Comparison EXPORT CONTROLLED INFORMATION – USG Authorization Required Prior to Export
Recommendation • Recommend baselining Y-velocity/X-nadir as nominal periapse pointing mode • No new spacecraft or APP pointing modes required • Consider new APP mode for IUVS limb scans as future trade • No vector singularities to deal with • Ram-Horizontal observations for STATIC are accommodated by simply rotating inner APP gimbal by 90 deg • Fixed roll offset (about Y) can be used to approximate Y-vel/Z-sun mode • Consider for future investigation • Expect lower desat and drag make-up delta-V • Analysis • NGIMS FOV obstruction: is this OK? • Power • Update delta-V analysis EXPORT CONTROLLED INFORMATION – USG Authorization Required Prior to Export
Illustrations (Y-vel/X-nadir) Ram-horizontal periapse operations (notice rotated APP) Optional fixed roll to improve power Nominal periapse operations EXPORT CONTROLLED INFORMATION – USG Authorization Required Prior to Export