Download

1 / 92
1.11k likes | 1.69k Vues
INDUSTRIAL ROBOTICS AND EXPERT SYSTEMS. robot: ( noun ) …. What is a robot ?. Jacques de Vaucanson (1709-1782). Master toy maker who won the heart of Europe. Flair for inventing the mechanical revealed itself early in life .

E N D
robot: (noun) … What is a robot?
Jacques de Vaucanson(1709-1782) • Master toy maker who won the heart of Europe. • Flair for inventing the mechanical revealed itself early in life. • He was impressed by the uniform motion of the pendulum of the clock in his parents hall. • Soon he was making his own clock movements.
Pre-History of Real-World Robots: • The earliest remote control vehicles were built by Nikola Tesla in the 1890's. • Tesla is best known as the inventor of AC power, induction motors, Tesla coils, and other electrical devices.
Popular culture influenced by these ideas History of Robotics? • RUR • Metropolis(1927) • Forbidden planet(1956) • 2001 A Space Odyssey(1968) • Logans Run(1976) • Aliens(1986)
The U.S. military contracted the "walking truck" to be built by the General Electric Company for the U.S. Army in 1969. Walking robots
Unmanned Ground Vehicles • Three categories: • Mobile • Humanoid/animal • Motes • Famous examples • DARPA Grand Challenge • NASA MER • Roomba • Honda P3, Sony Asimo • Sony Aibo
Unmanned Aerial Vehicles • Three categories: • Fixed wing • VTOL • Micro aerial vehicle (MAV), which can be either fixed wing or VTOL • Famous examples • Global Hawk • Predator • UCAV
Autonomous Underwater Vehicles • Categories • Remotely operated vehicles (ROVs), which are tethered • Autonomous underwater vehicles, which are free swimming • Examples • Persephone • Jason (Titanic) • Hugin
Discussion of Ethics and Philosophy in Robotics • Can robots become conscious? • Is there a problem with using robots in military applications? • How can we ensure that robots do not harm people? • Isaac Asimov’s Three Laws of Robotics
Isaac Asimov and Joe Engleberger • Two fathers of robotics • Engleberger built first robotic arms
Asimov’s Laws of Robotics First law (Human safety): A robot may not injure a human being, or, through inaction, allow a human being to come to harm. Second law (Robots are slaves): A robot must obey orders given it by human beings, except where such orders would conflict with the First Law. Third law (Robot survival): A robot must protect its own existence as long as such protection does not conflict with the First or Second Law. These laws are simple and straightforward, and they embrace the essential guiding principles of a good many of the world’s ethical systems. – But: They are extremely difficult to implement
The Advent of Industrial Robots - Robot Arms • There is a lot of motivation to use robots to perform task which would otherwise be performed by humans: • Safety • Efficiency • Reliability • Worker Redeployment • Cheaper
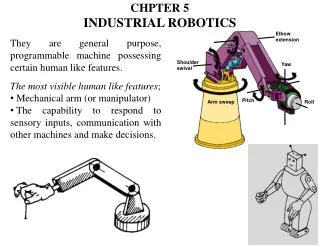
Industrial Robot Defined A general-purpose, programmable machine possessing certain anthropomorphic characteristics Hazardous work environments Repetitive work cycle Consistency and accuracy Difficult handling task for humans Multishift operations Reprogrammable, flexible Interfaced to other computer systems
What are robots made of? • Effectors: Manipulation Degrees of Freedom
Robot Anatomy Manipulator consists of joints and links Joints provide relative motion Links are rigid members between joints Various joint types: linear and rotary Each joint provides a “degree-of-freedom” Most robots possess five or six degrees-of-freedom Robot manipulator consists of two sections: Body-and-arm – for positioning of objects in the robot's work volume Wrist assembly – for orientation of objects Link3 Joint3 End of Arm Link2 Link1 Joint2 Joint1 Link0 Base
Manipulator Joints Translational motion Linear joint (type L) Orthogonal joint (type O) Rotary motion Rotational joint (type R) Twisting joint (type T) Revolving joint (type V)
Polar CoordinateBody-and-Arm Assembly Notation TRL: Consists of a sliding arm (L joint) actuated relative to the body, which can rotate about both a vertical axis (T joint) and horizontal axis (R joint)
Cylindrical Body-and-Arm Assembly Notation TLO: Consists of a vertical column, relative to which an arm assembly is moved up or down The arm can be moved in or out relative to the column
Cartesian Coordinate Body-and-Arm Assembly Notation LOO: Consists of three sliding joints, two of which are orthogonal Other names include rectilinear robot and x-y-z robot
Jointed-Arm Robot Notation TRR:
SCARA Robot Notation VRO SCARA stands for Selectively Compliant Assembly Robot Arm Similar to jointed-arm robot except that vertical axes are used for shoulder and elbow joints to be compliant in horizontal direction for vertical insertion tasks
Wrist Configurations Wrist assembly is attached to end-of-arm End effector is attached to wrist assembly Function of wrist assembly is to orient end effector Body-and-arm determines global position of end effector Two or three degrees of freedom: Roll Pitch Yaw Notation :RRT
An Introduction to Robot Kinematics Renata Melamud
An Example - The PUMA 560 2 3 4 1 There are two more joints on the end effector (the gripper) The PUMA 560 hasSIXrevolute joints A revolute joint has ONE degree of freedom ( 1 DOF) that is defined by its angle
Other basic joints Revolute Joint 1 DOF ( Variable - ) Prismatic Joint 1 DOF (linear) (Variables - d) Spherical Joint 3 DOF ( Variables - 1, 2, 3)
We are interested in two kinematics topics Forward Kinematics (angles to position) What you are given: The length of each link The angle of each joint What you can find: The position of any point (i.e. it’s (x, y, z) coordinates Inverse Kinematics (position to angles) What you are given: The length of each link The position of some point on the robot What you can find: The angles of each joint needed to obtain that position
Quick Math Review Dot Product: Geometric Representation: Matrix Representation: Unit Vector Vector in the direction of a chosen vector but whose magnitude is 1.
Quick Matrix Review Matrix Multiplication: An (m x n) matrix A and an (n x p) matrix B, can be multiplied since the number of columns of A is equal to the number of rows of B. Non-Commutative Multiplication AB is NOT equal to BA Matrix Addition:
Basic Transformations Moving Between Coordinate Frames Translation Along the X-Axis Y O (VN,VO) VNO VXY VO P N X VN Px Px = distance between the XY and NO coordinate planes Notation:
Writing in terms of Y O VNO VXY VO P N VN X
O Translation along the X-Axis and Y-Axis Y VO VNO N VXY VN PXY X
Using Basis Vectors Basis vectors are unit vectors that point along a coordinate axis O Unit vector along the N-Axis Unit vector along the N-Axis VO VNO Magnitude of the VNO vector N VN
Y Y X O Z VO V N VY VN X VX Rotation (around the Z-Axis) = Angle of rotation between the XY and NO coordinate axis
Y Unit vector along X-Axis O Can be considered with respect to the XY coordinates or NO coordinates VO V N VY VN X VX (Substituting for VNO using the N and O components of the vector)
Similarly…. So…. Written in Matrix Form Rotation Matrix about the z-axis
Y1 O (VN,VO) Y0 N VNO VXY X1 P Translation along P followed by rotation by X0 (Note : Px, Py are relative to the original coordinate frame. Translation followed by rotation is different than rotation followed by translation.) In other words, knowing the coordinates of a point (VN,VO) in some coordinate frame (NO) you can find the position of that point relative to your original coordinate frame (X0Y0).
HOMOGENEOUS REPRESENTATION Putting it all into a Matrix What we found by doing a translation and a rotation Padding with 0’s and 1’s Simplifying into a matrix form Homogenous Matrix for a Translation in XY plane, followed by a Rotation around the z-axis
Rotation Matrices in 3D – OK,lets return from homogenous repn Rotation around the Z-Axis Rotation around the Y-Axis Rotation around the X-Axis
Y P X Z Homogeneous Matrices in 3D H is a 4x4 matrix that can describe a translation, rotation, or both in one matrix O N A Translation without rotation Y O N X Rotation part: Could be rotation around z-axis, x-axis, y-axis or a combination of the three. Z Rotation without translation A
Homogeneous Continued…. The (n,o,a) position of a point relative to the current coordinate frame you are in. The rotation and translation part can be combined into a single homogeneous matrix IF and ONLY IF both are relative to the same coordinate frame.
Finding the Homogeneous Matrix EX. J Y N I T P X K A O Z Point relative to the I-J-K frame Point relative to the N-O-A frame Point relative to the X-Y-Z frame
J Y N I T P X K A O Z Substituting for
Product of the two matrices Notice that H can also be written as: H = (Translation relative to the XYZ frame) * (Rotation relative to the XYZ frame) * (Translation relative to the IJK frame) * (Rotation relative to the IJK frame)