Download

1 / 38
380 likes | 588 Vues
הטכניון - מכון טכנולוגי לישראל TECHNION - ISRAEL INSTITUTE OF TECHNOLOGY הפקולטה להנדסת חשמל המעבדה לבקרה ורובוטיקה. Idle speed control- A benchmark for hybrid system research. : מבצעים ערן גפני 025745027 אדיר ורטה 032554578 מנחה : ד"ר מרק מולין. מבוא.

E N D
הטכניון - מכון טכנולוגי לישראל TECHNION - ISRAEL INSTITUTE OF TECHNOLOGYהפקולטה להנדסת חשמלהמעבדה לבקרה ורובוטיקה Idle speed control- A benchmark for hybrid system research :מבצעים ערן גפני 025745027 אדיר ורטה 032554578 מנחה: ד"ר מרק מולין
מבוא עוד משחר המצאת המנועים היוותה בעיית הבקרה שלהם אתגר . בעיית הבקרה המרכזית הייתה שליטה במהירות הסיבוב ואספקת הכוח ממנו והתאמתם לצרכי ניצולו . בשנים האחרונות עקב משבר האנרגיה והמודעות הגוברת לאיכות הסביבה עולה הצורך לחסכון באנרגיה. מטרת הפרוייקת שלנו הנה מציאת פתרון בקרה למנוע בטורי סרק כאשר תיבת ההילוכים נמצאת בהילוך סרק בהוצאת מינימום אנרגיה. מצב זה מדמה עמידה ברמזור אשר מהווה מקור בזבוז דלק וזיהום אוויר משמעותי בחיי היום יום.
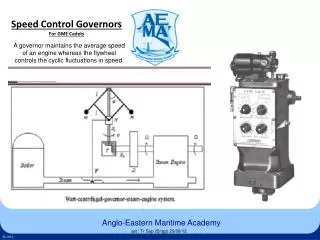
הצגת מבנה ופעולת מנוע שריפה פנימית מנוע בעירה פנימית מתרגם אנרגיה כימית לתנועה קוית . לאחר מכן מתורגמת התנועה הקוית לתנועה סיבובית. כל אלו מתבצעים בעזרת הצילינדר, הבוכנה, השסתומים ,המצת (במנוע בנזין) וגל הארכובה. שסתומים מצת צילינדר בודד: בוכנה טלטל גל הארכובה
המנוע הנפוץ ביותר כיום הנו מנוע 4 הפעימות. פעולת מנוע זה נחלקת ל4 שלבים (פעימות) כל פעימה הנה מכינה לשלב הבא. 1. יניקה: שאיבת תערובת אויר ודלק לחלל הצילינדר דרך שסתום היניקה. 2. דחיסה: דחיסת התערובת לחלל השריפה . 3.עבודה: הצתת התערובת ע"י המצת ודחיפת הבוכנה למטה עקב התחממות האויר. 4.פליטה:פינוי התערובת השרופה דרך שסתום הפליטה. כמובן שרק פעימת העבודה מייצרת אנרגיה בעוד השאר צורכות,ולכן רק רבע מתנועת המנוע מייצרת אנרגיה.
מנוע 4 צילינדרים ע"מ להתגבר על אספקת האנרגיה הלא רציפה נבנים רוב המנועים כיום בתצורת 4 צילינדרים, כאשר ע"מ להתגבר על בעיית האיזון הבוכנות נעות בזוגות (תנע קוי משותף=0 ) כשכל בוכנה מבצעת פעימה שונה בכל זמן נתון. כך אנו מקבלים פעימת עבודה בכל חצי סיבוב מנוע. במודל אותו נבקר נעשה שימוש בעובדה זאת ע"י כך שהוא מתייחס רק לפעימת העבודה המתבצעת בכל חצי סיבוב בעוד את השאר הוא ממדל כהתנגדות לסיבוב.
מערכת העברת הכוח (POWER TRAIN) ע"מ לתרגם את התנועה הקוית לסיבובית נעשה שימוש בגל הארכובה. אל גל הארוכבה מתחבר המצמד (ניתן לחיבור וניתוק) אשר מחובר מצידו השני לתיבת ההילוכים. תיבת ההילוכים מורכבת משני גלים ,כאשר הראשון מחובר קבוע אל המצמד והשני מתחבר לראשון כאשר משולב הילוך. במודל שלנו כאמור תיבת ההילוכים אינה משולבת ולכן השפעת חיבור המצמד הנה הנעת הגל הראשון בלבד (מאסת המתכת).
העומסים במודל נעסוק בשני סוגי עומסים: 1. עומס בעל פרופיל מדרגה (ON OFF)– הגה כוח/מזגן. 2. עומס משתלב – חיבור וניתוק המצמד. 1'. עומס מדרגה ימודל בפשטות כהחסרת כוח מהכוח המיוצר ע"י המנוע. 2'. עומס משתלב הנו מודל מורכב יותר מכיון שבחיבור המצמד מתווספת למעשה מאסה נוספת למאסת המנוע,לכן ברגע החיבור נוסף עומס עצום אולם כאשר המאסה מתחילה להסתובב וצוברת אינרציה סיבובית העומס יורד לדרגה נמוכה ושולית (ואף מסייע למנוע ברובסטיות כנגד עומס מדרגה כיוון שהאינרציה הסיבובית גדולה יותר -"גלגל תנופה") . כתוצאה מכך לניתוק המצמד כמעט ולא יהיו תופעות לוואי על המנוע.
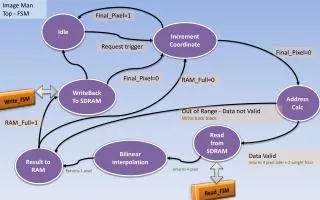
מודל המנוע ב SIMULINK מערכת ההצתה מערכת העברת הכוח המנוע מידול עומסים סעפת היניקה
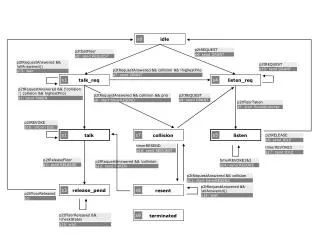
מודל המנוע ב SIMULINK באופן טבעי ,עקב החלוקה לפעימות שונות ממודלת אספקת האנרגיה במודל איתו אנו עובדים ע"י STATE FLOW אשר הנו מודל דאגרמת מצבים. מודל זה הנו "ליבת המערכת" ומשתמש בנתונים המסופקים לו ע"י מערכות העזר של המנוע הממודלות ע"י מודלי SIMULINK "רציפים" כגון סעפת היניקה עומסים וכו.. לכן נקרא מודל זה "היברידי". כמו כן ממודלות באופן דומה מערכת העברת הכוח וההצתה.
אתגר ואמצעי הבקרה אתגר הבקרה: שמירת המנוע בטורי סרק (800 סל"ד) ובהילוך סרק ,תוך הפעלת עומסים שונים וכל זאת ע"י שימוש בכמות דלק מינימלית. יש לציין שבסביבת סל"ד זאת המנוע נמצא במצב רגיש ביותר במבחינת עמידות לעומסים כיון שזהו תחום בו יכולת אספקת הכוח נמוכה ביותר והוא נוטה לכבות. לכן באופן טבעי דרוש בקר בעל רובסטיות טובה.
אמצעי הבקרה: • ע"מ לבקר את המנוע נשתמש בשני אמצעים: • שליטה בזווית המשנקאשר קובעת למעשה את כמות התערובת הנכנסת • למנוע ולכן את משטר האנרגיה. • 2. שליטה בזווית קידום ההצתהאשר שולטת בתזמון אספקת הניצוץ להדלקת התערובת ולכן הנה פונקציית נצילות. • השימוש באמצעי הבקרה: • השליטה בזווית המשנק משנה כאמור את כמות האנרגיה הפוטנציאלית הנכנסת למנוע • ולכן כמובן את הכמות המופקת ממנו, אולם כיוון שהתערובת נעה דרך • סעפת (יניקה) ארוכה ומונעת ע"י תת לחץ המגיע מהצילינדר (איננו לינארי) • ישנו פער זמן גדול יחסית בין שינוי הזווית והשפעתו על המנוע.
לעומת זאת השליטה בזווית קידום ההצתה (יחסית למיקום הבוכנה במעלות) משנה את תזמון הניצוץ ולכן משפיעה על ניצול שריפת התערובת להפקת האנרגיה מהמנוע,לכן אנו מתחשבים בשינוי זה כפונקציית יעילות בעלת תגובה מהירה . מסקנות: כאשר נוסף עומס למנוע נרצה להביא את פונקציית הנצילות למקסימום והוסיף אנרגיה פוטנציאלית. במצב בו יורד עומס מהמנוע נרצה להקטין את פונקציית היעילות (תגובה מהירה) ולהקטין את האנרגיה הפוטנציאלית וכך למנוע טיפוס מהיר בסל"ד.
הפתרון • לאחר הבנת צרכי ואופי המערכת , הפתרון אותו הצענו היה בניית בקר • משתלב המזהה את סוג העומס המופעל (עפ"י גזירת מהירות סיבובי המנוע) • והפעלת תגובה מותאמת לכל אחד מן המצבים הקיימים: • עומס מדרגה- משתלב/מתנתק. • עומס "משתלב" – משתלב/מתנתק. • וכן את האופציות הנובעות משילובי העומסים. משתני המצב: לאור נתוני המאמר בחרנו להתייחס למשתני המצב- p,n,m כאשר: p- לחץ האויר בסעפת היניקה. m- מאסת האויר בצילינדר בסוף פעימת היניקה. n- מהירות סיבובי המנוע (מסופק כיציאת המנוע).
כניסות ויציאות המערכת כניסות המערכת: - זווית קידום ההצתה. - זווית פתיחת המשנק. יציאת המערכת: n - מהירות סיבובי המנוע.
משוואות המודל מודל המנוע נשען על מספר משוואות המייצגות אותו ואת תלות משתני המצב בכניסות ובעצמן. כאשר: - זוית וסת האוויר בתערובת α Intake Manifold - לחץ ה p - כניסת שטף האוויר דרך הוסת fthr(α) - זרימת שטף האוויר דרך הצילינדרים q=ftcyl(p,n) - קבוע הגזR Intake Manifold- טמפרטורת האוויר של ה Tair הנפח- Vpln
כאשר: תנע הצילינדר – T מסת האוויר בצילינדר - m יעילות ההנעה ביחס לזוית התקדמות ההצתה - η(φ) - פונקציות יצירת התנע במצבים השונים Ge, Gn
שלביהתכן א. ביצוע לינאריזציה למודל המנוע תחת כל אחת מאופציות העומס. ב. תכנון בקר לכל אחת מאופציות אלו. ג. תכנון משחזר משתני המצב מתוך n . ד. תכנון בורר אשר יקבע איזה מן הבקרים לשלב. ה. חיבור הבקרים המשחזר והבורר למודל המנוע.
פרוט התהליך שבוצע עבור מנוע תחת עומס מדרגה לינאריזציה מציאת מטריצה A: בשלב ראשון נבודד את המשוואות הרלוונטיות למשתני המצב כפי שנבחרו:
כעת לפי: נקבל:
כעת ע"מ לקבל את הערכים הנומינלים נשווה את : ונקבל: ערכים אלו נציב במטריצות שהתקבלו לקבלת לינאריזציית מערכת המצב.
הערה: ניתן להבחין כי המטריצות אינן מאוזנות –דבר שיפגע ביכולת הבקרה
בחירת סוג הבקר עקב אובזרבביליות המערכת החלטנו לתכנן בשלב ראשון בקר מצב שהנו פשוט לתכנון ורובסטי יחסית. את תכנון הבקר בצענו בעזרת פונקציית PLACE תוך שאנו בוחרים מיקום קטבים המדמים מערכת מסדר 2 וממקמים אותם באופטימיזציה ידנית.
תכנון משחזר המצב משחזר המצב היה פשוט לתכנון מכיוון שמשוואותיו זהות למשוואות שניתנו לנו במאמר ושעליהן נשען המודל..
תכנון בורר: לא תוכנן בורר מכיון שכפי שאציג ,לא הצלחנו להשלים את בניית הבקר הראשון.
חיבור הבקר והמשחזר למודל המנוע הלא לינארי
ביצועי המנוע המבוקר: מהירות סיבובי המנוע: ניתן לראות כי המנוע נכבה
בניסיון לנתח את חוסר התאמת הבקר למודל הבחנו כי קיימת בעייה בפרמטר מסת האויר ,בעוד הבקר דוגם את מסת האויר כל הזמן, המודל דוגם אותה רק לפני קיום הניצוץ. לכן קריאת הבקר את המצב הנה כאילו המנוע נכבה בין הניצוצות ומכאן נובעת חוסר התאמה הרסנית. ע"מ להתגבר על הבעיה הוספנו sample and hold אשר "מחזיק" את הערך האחרון שהתקבל לפני הניצוץ. בגרפים המוצגים ניתן לראות את המשמעות של מסת האויר לפני ואחרי הרכיב.
יציאות הבקר ניתן לראות את חוסר הרציפות הנכפת על הבקר.
בעיות נוספות שנבדקו: • מידול הגבלת הזוית של המשנק וקידום ההצתה: נוסה פתרון של • הכנסת רכיב רוויה אולם הוא גרם לבידור המערכת עקב הגברת מאמץ • הבקר כאשר היה תחת הגבלה (שאינה תורמת למצב המערכת ולכן גורמת • להגברה נוספת....). • 2. חוסר דיוק במודל הלינארי לעומת המודל הלא לינארי: להערכתנו • זאת אינה הבעיה. • 3. מרחק גדול מדי בין נקודת הלינאריזציה ומצב המנוע: ייתכן אולם איננו • מעריכים כי זאת הבעיה. • 4. בעיית שיחזור: כפי שנאמר –המשחזר בנוי לפי משוואות המודל ולכן • לא קיימת סטיה בינהם (נבדק בפועל כדי לסתור מרווחי תזמון חישובם).
דיון בתוצאות • נראה כי מודל המנוע כשלעצמו הנו מודל טוב אולם חסרה בו התייחסות • לעולם האמיתי בו הוא נכבה לדוגמא. • 2. ממשק העבודה בין STATE FLOW וה SIMULINK קשה לשליטה וטוב • למודלים מוגבלים . לצערנו לא הצלחנו להתגבר על בעיות ממשק זה • ולכן השקענו זמן רב בבעיה שאיננה בעיית בקרה וחבל ,מכיון שבעיית בקרה • זאת הנה מעניינת ובעלת אפליקציות רבות . • 3.אין ספק שבקרה המשלבת זווית משנק וקידום הצתה הנה גישה טובה • ומאפשרת שימוש בשני העולמות על יתרונותיהם כפי שהוצגו.
סיכום: מטרת העל של הפרוייקט בו עסקנו הנה בדיקת כדאיות השימוש במודל היברידי של מנוע שריפה פנימית לתכנון בקרים. במהלך הפרוייקט שלנו נתקלנו בקשיים רבים דווקא בתחום זה בו הקושי הנו בשילוב מרכיבי המערכת הרציפים והבדידים והבקר הרציף. עקב כך אנו מסיקים כי שימוש במודל זה באם לא יימצא פתרון מניח את הדעת לממשק לא רק שיקשה אלא שלעיתים (כמו במקרה שלנו) אף לא יאפשר תכנון בקר ישים למנועים אמיתיים.