Download
1 / 9
90 likes | 227 Vues
This paper explores the metaphor of "pushing the envelope" in systems operation, focusing on safe limits. We propose a method where a computer enforces safety constraints, containing system states within defined viability envelopes. While traditional viability theory is abstract, our approach provides concrete and implementable solutions. We demonstrate containment strategies through user input overrides and multi-step corrections for added robustness. Our findings are applicable to various domains, including robotics and haptics, and we outline practical trade-offs and future work for complex systems.

E N D
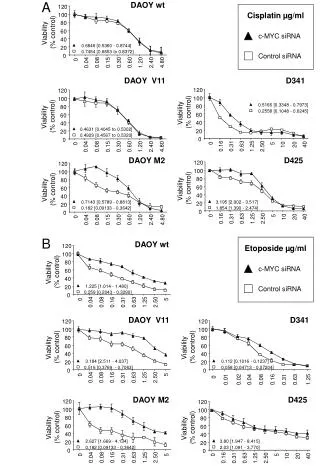
Viability Envelopes Maciej Kalisiak Michiel van de Panne
Idea and Motivation • exploring “pushing the envelope” metaphor • i.e., operating at/near (safe) limits • have the computer enforce safety • task: contain system state in envelope • viability theory: too general, abstract • our work: concrete, implementable solution
Envelope example: rocket • Xout = Xf Xfi • Xin = XopXur • want to operate in Xop… • ... or at least Xin
Containment: 1-step • idea: override user input if it breaches envelope in 1 time step • limited usefulness: sharp corrections
Containment: multi-step • idea: look further ahead • advantages: • milder corrections • useful info for haptics, allows guidance • more robust with approximate envelopes
Practical Trade-offs • approximate envelope using Nearest Neighbor • discretize control space
rocket (2D) car on straight road (2D) bicycle balance (2D) car in arbitrary terrain (3D) Results [show movies externally]
Future work • more complex systems • local-only knowledge of terrain • “building block”, archetype envelopes • explore how best to use with haptics