Download
1 / 1

E N D
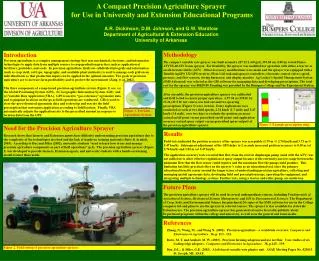
Introduction Precision agriculture is a complex management strategy that uses mechanical, electronic, and information technologies to apply data from multiple sources to crop production practices such as application of fertilizers, pesticides, and seeds. In precision agriculture, fields are subdivided into grids and information (such as crop yield, soil type, topography, and available plant nutrients) is used to manage each grid on an individual basis so that production inputs can be applied in the optimal amounts. Two goals of precision agriculture are to increase farm profitability and to protect the environment (Zang, et al, 2002). The three components of a map-based precision agriculture system (Figure 1) are: (a) the Global Positioning System (GPS), (b) Geographic Information System (GIS), and (c) Variable Rate Application (VRA). GPS is used to “geo-reference” agronomic data and to pinpoint locations on-the-go as field operations are conducted. GIS is used to store the geo-referenced agronomic data and to develop and execute the field prescription that customizes application according to field location. Finally, VRA automatically adjusts the applicationrate to the prescribed amount in response to location data from the GPS. Figure 1. Precision Agriculture System. Figure 3. Example prescription map. Figure 2. Field testing of precision agriculture sprayer. A Compact Precision Agriculture Sprayer for Use in University and Extension Educational ProgramsA.R. Dickinson, D.M. Johnson, and G.W. WardlowDepartment of Agricultural & Extension EducationUniversity of Arkansas Methodology The compact variable rate sprayer was built around a 227.12 L (60 gal), 355.60 cm (140 in) towed Fimco ATVTS-60-12V boom sprayer. For flexibility, the sprayer was modified for operation with either a tractor or an all-terrain vehicle (ATV). Other necessary modifications were made and the sprayer was equipped with a Trimble AgGPS 132 GPS receiver; Flexi-Coil task and sprayer controllers; electronic control valves; speed, pressure, and flow sensors; wiring harnesses; and display monitor. Ag Leader’s Spatial Management System (SMS Advanced) was selected as the GIS software for managing data and developing prescriptions. The total cost for the sprayer was $8029.00. Funding was provided by the Bumpers College and the Experiment Station. After assembly, the precision agriculture sprayer was calibrated and field tested to ensure proper operation. A 97.54 m (320 ft) by 13.26 (43.5 ft) test course was laid out and two spraying prescriptions (Figure 3) were written. Forty replications were conducted at each of two field speeds, 2.74 km/h (1.7 mi/h) and 5.47 km/h (3.4 mi/h), over two days to evaluate the position accuracy (actual on/off point versus prescribed on/off point) and application accuracy (actual spray output versus prescribed spray output) of the precision agriculture sprayer. Need for the Precision Agriculture Sprayer Research shows that farmers and Extension agents have difficulty understanding precision agriculture due to the complexity of the technologies involved and the lack of hands-on training materials (Batte & Arnholt, 2003). According to Dux and Miles (2002), university students “need to learn how to use and manage precision agriculture components as part of field operations” (p.2). The precision agriculture sprayer (Figure 2) was developed to provide farmers, Extension agents, and university students with a hands-on learning model to meet these needs. Results Field tests indicated the position accuracy of the sprayer was acceptable (1.79 m @ 2.74 km/h and 3.73 m @ 5.47 km/h). Subsequent adjustment of the GPS delay to 2 seconds increased position accuracy to 0.30 m (at 2.74 km/h) and 1.02 m (at 5.47 km/h). The application accuracy tests revealed that flow from the electric diaphragm pump (used with the ATV) was not sufficient to allow effective regulation of spray output because of the extremely narrow range between the minimum flow that the flow sensor could register and the maximum flow the pump could produce. This limitation has little practical effect on the sprayer’s value as an educational tool, since the primary educational benefits center around the larger issues of understanding precision agriculture, collecting and managing spatial agronomic data, developing field and prescription maps, operating the equipment, and integrating multiple technology systems. Further tests, using a tractor and roller pump, are underway. Future Plans The precision agriculture sprayer will be used in several undergraduate courses, including Fundamentals of Agricultural Systems, Mechanized Systems Management, and GIS in Environmental Sciences. The Department of Crop, Soils, and Environmental Science has purchased 24 copies of the SMS software for use in the College computer lab and plans to use the sprayer in selected courses. The sprayer is also available for statewide Extension use.The precision agriculture sprayer has generated extensive favorable publicity about Department programs within the college and university, as well as in the general and farm media. • References • Zhang, N., Wang, M., and Wang N. (2002). Precision agriculture - a worldwide overview. Computers and Electronics in Agriculture. 36, p. 113 - 132. • Batte, M. T. and Arnholt, M. W. (2003). Precision farming adoption and use in Ohio: Case studies of six leading-edge adopters. Computers and Electronics in Agriculture. 38, p.125 - 139. • Dux, D.L., & Miles, G.E. (2002). A lab-based variable-rate planter unit. ASAE Meeting Paper No. 021013. St. Joseph, MI: ASAE.