Innovative Kite Aerial Photography Design: System Components and Cost Analysis
This presentation outlines the design and functionality of a controllable kite aerial photography (KAP) system. Key topics include existing KAP technology, design objectives, and components, such as cameras, cradle systems, and video transmission methods. The analysis covers material costs, expanding on various kite types and cradle designs to ensure optimal camera control and motion. We emphasize the necessity for thorough testing and experimentation to address funding challenges. Join us for a deep dive into the future of aerial photography using kites.


Innovative Kite Aerial Photography Design: System Components and Cost Analysis
E N D
Presentation Transcript
Kite Camera Group Members: Marc Bland Mark Burchill Walter Perry Robert Popovitch Andrew Theriault
Presentation Outline • Existing Technology • Design Objectives and Goals • Components for Design • Cost Analysis • Schedule • Conclusions • Questions
Existing Technology • Kite Aerial Photography (KAP) • Began with Hobbyist • Still-Photography • Simple suspension systems
Design Objectives and Goals • Design a controllable aerial photography system to accurately capture pictures and video • construct suspension and cradle system • maximize range of motion with motors/electronics • Live streaming video
Components for Design • Kite • Camera Cradle • Cradle Suspension • Camera • Video Transmission • Pan & Tilt Controls
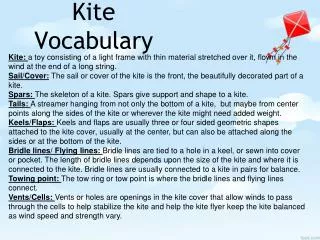
Kites • Winged-Box • Stable in heavy winds due to it’s boxed frame • Flies in light winds due to its’ winged design • Rokkaku • Solidly built • Adjustable tensioning • Winds ranging from 4-8 mph
Kite Selection • Parafoil • Steady and easy to control • Inexpensive • Easily assembled • Excellent lift • Winds ranging from 8-25 mph • 17 square feet
Cradle System • Cradle design crucial for maximum camera control • Goal to obtain pan and tilt motions • Critical Design Characteristics • Center of Gravity • Range of Motion • Support Type
Cradle Design Types • LL Design • Most simple design • Lightweight • Supports only smaller cameras • Smaller range of motion
Cradle Design Types • UU Design • Little more supportive • Capable of heavier weights • Larger range of motion • Tilting motion only
Cradle Design Types • UU Hover Variation Design • Most complex • Largest range of motion • Capable of horizontal and vertical motions (tilt and pan)
Suspension Types Pendulum Picavet
Pendulum • Made of two rigid tubes • Hard to control camera’s movements • Uncontrollable swinging leads to inaccurate and blurry pictures
Picavet • Contains a self-leveling platform that resists rotation • Suspension line attached various ways • Small cross resists rotation better than a large one
Attaching the Picavet Suspension • Ball bearing • Pulleys • Eye holes • Cord locks
Attaching the Suspension to the Kite • Prussik Knot • Line Tree • Brooxes Hangup
Threading the Line Threading SequenceA1 - 1 - B1 - R - 4 - A2 - R - 2 - B2 - 3 - A1.
Cameras • Snap Shot • Takes still images • Blind shots • Smaller • Video • Allows for live streaming video • More expensive
Digital Video Cameras • JVC GR-D70U • 16x optical zoom • Sports mode • Li ion battery • Mustek DV 5500 • Lightweight • Cost effective ($100) • Li ion battery
Video Transmission • Types • Fiber Optic Cable • Wireless RF Transmitter • S-Video Cable
Fiber Optic Transmitter • Includes a transmitter and receiver • Power supply needed for transmitter
Wireless RF Transmitter • Includes a transmitter and receiver • No mess with wires • Quality may not be great
Pan and Tilt Controls • Controlled by PIC (Peripheral Interface Controller) • PIC16F873
Pan and Tilt Controls • PIC will be wired up kite line to power 180O servo and a 360O servo or stepper motor attached to the camera cradle
Cost Analysis Materials Quantity Cost ($) Kite 1 200 Camera 1 250 Camera cradle 1 30 Cradle suspension 1 30 Servo (one 180deg, one 360deg rotation) 2 100 #12 THHN Cu wire (stranded) 100 ft. 20 Fiber optic cable transmission 1 200 Power supply 1 50 Total: 880
Conclusion • Integrated systems of Kite Camera • Funding is a possible problem • Testing and experimentation is vital
? ? ? ? ? ? ? ? ? ? Questions ?