Download
1 / 9
100 likes | 218 Vues
This article explores the digital processing of gyroscope and accelerometer data in inertial measurement devices, particularly Micro-Electro-Mechanical Systems (MEMS). It discusses how three-axis accelerometers and gyroscopes measure inertial forces and rotational rates, while highlighting common issues like jitter and drift. Solutions are presented, including low-pass filters, complementary filters, and the Kalman filter for state estimation and orientation accuracy. The article further considers the integration of multiple sensors for enhanced performance in navigation systems and discusses the significance of Directional Cosine Matrices.

E N D
WILL BAKER Kalman Sense Digital Processing of Gyroscope & Accelerometer Measurements
Inertial Measurement Devices • Micro-Electro-Mechanical Systems (MEMS) • 3-axis Accelerometer • Measures Inertial Force Vectors • X,Y,Z Trigonometric Relations Orientation • 3-axis Gyroscope • Measures rotation about an axis • Rate of change in degrees/sec • Integrated over time to relative angles • 3-axis Magnometer • Measures magnetic fields (Compass)
Orientation • Align axis of each device to maintain a uniform coordinate system
Problems? • Accelerometer has JITTER • Random noise introduced to the system • Gyroscope has DRIFT • Does not return to zero rate when rotation stops • Tends to linearly increase (ramp up)
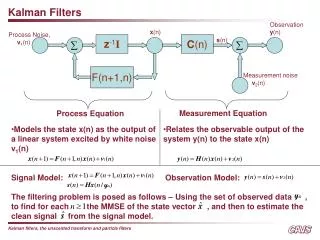
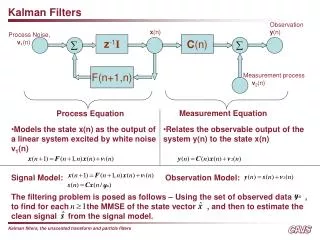
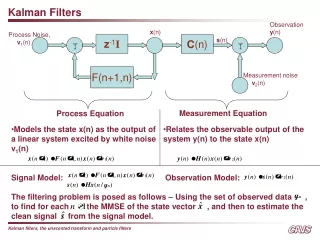
Solutions? • Low Pass Filter • Filter out short-duration accelerations • Only long-term acceleration passes • Introduces lag due to averaging • Complementary Filter • Use Low-Pass filter on accelerometer • Numeric integration and High-Pass filter on gyroscope • Kalman Filter • Predict state and accurately estimate orientation • Based on known physical properties of the system
Kalman Filtering • PREDICTION • Predict state estimate: • Gyro(k) – Accel(k-1) – bias • Predict Estimate Covariance • Noise from Gyro & Accel are independent • Less trust in accelerometer
Kalman Continued • UPDATE • Y=Accel(k) • YINNOVATION = Accel(k) – estimate(k-1) Covariance JitterAcellerometer ≈ .3 rad • Calculate Kalman Gain • Inversely proportional to covariance • Correct Prediction State X=X+KYINNOVATION • Calculate covariance of prediction error
Expansion • KalmanFilter used to de-noise the system • More Sensors = More Fun • Magnometer used for Yaw correction • Accelerometer Z-reference is always down (Gravity) • Difficult to account for YAW • GPS used for centrifugal acceleration adjustment • More information available means more feedback to account for errors and misallignment • Directional Cosine Matrix (DCM) • Describe absolute orientation based on two coordinate systems relative to one another (reference frame) • Rotational Matricies are used to related the two coordinate systems and plot how the object has rotated in the X,Y,Z planes
Conclusions + Demonstration • Vast amount of sensors in micro electronics allow for the collection and manipulation of data to determine ‘real’ orientation • These algorithms are often used in navigation and flight control • The Kalman Filter uses a unique prediction method and error tracking to produce a stable output