Download
1 / 22
220 likes | 371 Vues
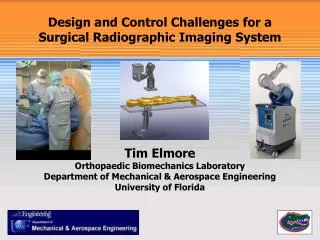
Design and Control Challenges for a Surgical Radiographic Imaging System. Tim Elmore Orthopaedic Biomechanics Laboratory Department of Mechanical & Aerospace Engineering University of Florida. The Motivation. What surgeons can see…. What surgeons want to see….

E N D
Design and Control Challenges for a Surgical Radiographic Imaging System Tim Elmore Orthopaedic Biomechanics Laboratory Department of Mechanical & Aerospace Engineering University of Florida
The Motivation What surgeons can see… What surgeons want to see… http://www.theploughhundon.co.uk/steak%20tuesday.jpg http://www.flickr.com/photos/stanfordmedicine/3660598599/
The Motivation The standard in industry … Current O-arm technology remains in sterile field, giving surgeon limited access to patient Over 100 ft3 total volume!
+ = The Motivation Existing project development… Gator-Ray !
The Motivation Existing project development… Gator-Ray !
Design Challenges for Surgical GatoRay • Kinematic • DOF • Obstacles • Reach • Accuracy • Kinetic • Payload mass • Velocity/Acceleration • Bearing life 5 degrees of freedom OR table, surgeons, equipment Under OR table to lateral view +/- 1mm, +/-1 deg 30-60kg (65-130lbs) 0.25m/s, 2.5m/s^2 1,500,000 cycles (100/day, 40yr)
Mitsubishi PA10-6CE Specifications Six Degree-of-Freedom Robot Arm 3-phase AC Brushless Servo Motors Harmonic Drive Transmissions Manufacturer Specified Positional Repeatability of ±0.1mm AND Joint Resolver Accuracy = ±0.44 arc min (0.0073º) 10kg payload limit
Mitsubishi PA10-6CE Specifications This payload would result in a 700% overload!
Alternative Manipulators • Panasonic VR-032 Robot • Axes: 6 • Payload: 32 kg • H-Reach: 1866 mm • Repeatability: ±0.15 mm • Robot Mass: 580 kg • Mounting: floor, ceiling • Disadvantages: • Size • Mass • EE rotations are translation dependent • Cost ($20,000 used) Table Height: 32 inches/810mm
Alternative Manipulators Parallel Manipulators Degrees of Freedom: 6 Payload: high (>30kg) Repeatability: good (<1mm) Robot Mass: low (<200 kg) Disadvantage: • Limited rotation angles • Limited translations
Alternative Manipulators Ballscrew/Rotary tables Degrees of Freedom: 1 per table Payload: high (>100kg) Repeatability: good (<1mm) Robot Mass: low (<200 kg) Advantages: • Each axis is customizable • Mass supported by frame, not torque
Undertable Robot X-Ray Source The Proposed System (v0.1)
Under table Robot X-Ray Sensor PA-10 X-Ray Source The Proposed System (v1.0)
X-Ray Source Undertable Robot The Proposed System (v1.0) Z Y X
Design Goals for Surgical GatoRay • Kinematic • 5 DOF (3 translation, 2 rotation) • Reach around table into lateral view • Displacement: 3 translation, 2 rotation • Accuracy 0.2mm/axis, 1mm total • Kinetic • 30-60kg payload • 0.5m/sec velocity, 5m/sec2 acceleration • 1,500,000 cycles at 30kg load
Kinematics • By inspection, task space dependencies: • Rx = f(xjs,Θzjs) • Ry= f(yjs,Θzjs) • Rz= f(zjs) • Θx = f(Θxjs) • Θz= f(Θxjs, xjs, yjs) Z Y X
Kinetics • Motor choices • Servo • Pros: torque, speed • Cons: size, price, control • Stepper • Pros: size, price, control • Cons: torque, speed
Kinetics Servo Control Input Output Stepper Control Input Output
Stepper Motors 125kg horizontal payload 30kg vertical payload time time