
Uploaded by
badu
0 SLIDES
580 VUES
30LIKES
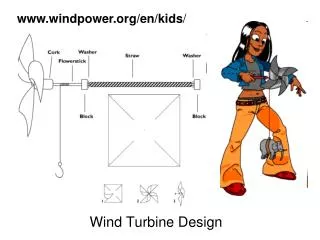
Wind Turbine Basics
DESCRIPTION
Wind Turbine Basics. Operating Point. Pitch. Wind. Lift, Drag. Blades. Nacelle. Generator. Geartrain. Hub. Primary Goal Spin at or near operating speed. Rotor Speed. Generator Speed. Yaw. Grid. Tower. Model the Generator, Grid, and Geartrain. Model:. Grid. Geartrain.
Download

1 / 0
Télécharger la présentation 
Wind Turbine Basics
An Image/Link below is provided (as is) to download presentation
Download Policy: Content on the Website is provided to you AS IS for your information and personal use and may not be sold / licensed / shared on other websites without getting consent from its author.
Content is provided to you AS IS for your information and personal use only.
Download presentation by click this link.
While downloading, if for some reason you are not able to download a presentation, the publisher may have deleted the file from their server.
During download, if you can't get a presentation, the file might be deleted by the publisher.
E N D
Presentation Transcript
- Wind Turbine Basics OperatingPoint Pitch Wind Lift, Drag Blades Nacelle Generator Geartrain Hub Primary Goal Spin at or near operating speed RotorSpeed GeneratorSpeed Yaw Grid Tower
- Model the Generator,Grid, and Geartrain Model: Grid Geartrain Transformer Load Problem:Model the geartrain, generator, and electrical gridfor the wind turbine Solution: Use SimDrivelineand SimPowerSystems to model the electrical grid and geartrain
- Summary Control SupervisoryLogicAero-dynamics Mechanical HydraulicElectrical Modeling the entire system at the system level enables engineers to optimize system performance The ability to easily adjustthe level of model fidelityenables efficient development Automatically documentingtests can speed up designiterations and provide necessaryproof of system performance Drag Lift Park Actuator(Ideal) System (Include) Inputs Spin Wind Actuator(Realistic) System (Ignore)
- Test Controller Hardware and Performance of Generated Control Code Model: Wind Turbine WindSpeed PitchCommand PitchControl Algorithm PitchActuator TestVector Pitch Angle Rotor Speed PitchCommand AnemometerSignal PitchAngle Problem:Test control algorithm on actual controller hardware without using prototypes Solution: Generate C code for controller and plant to run hardware-in-the-loop tests
- HIL Test Setup HIL System Pitch command iscommunicated via CANto pitch actuators. Pitch angle is sensedand sent back to main controller via CAN. Anemometer measures wind speedand provides input signal to HIL system Simulink Model Bachmann electronicM1 hardware controllerruns turbine model in real time Model is configured for HIL tests,converted to C code, and downloaded to controller
- Test Hydraulic Actuator WithParallel Computing Model: Problem:Run a parameter sweep for hydraulic pitch actuation system Solution: Use Parallel Computing Toolbox to speed up the set of tests Multi Core Parameter Set 1 Parameter Set 2 … Parameter Set N
- Test Hydraulic Actuator WithParallel Computing Steps to compare simulation methods 1. Open pool of MATLAB sessions 2. Generate parameter sets 3. Run simulations serially 4. Run simulations in parallel Parameter Set 1 >> matlabpool 2 Parameter Set 2 … Parameter Set N rpm = [500:18:2300]; Generate_Sim_Settings fori = 1:numSims out{i} = sim(mdl, SimSettings{i}); end Multi Core parfori = 1:numSims out{i} = sim(mdl, SimSettings{i}); end
- Use Local Solvers to Improve Simulation Speed Controller Model: Variable step, implicitsolver ODE15s (Reference) Sim Time 4.3 sec Controller A A B B NumericallyStiff System Fixed-step, explicitsolver (ODE5) SimTime 2.0 sec Fixed-step, implicitsolver (ODE14x) Sim Time 10.5 sec Problem:Configure solvers to minimize computations so the model can simulate in real time Solution: Use local solvers on physical networks and expand step size as much as possible Localsolver: Implicitfixed-step




More Related