Chapter 8 Interpolation (1)
Chapter 8 Interpolation (1). Table of Contents. 8.1 Polynomial Interpolation 8.1.1 Lagrange Interpolation 8.1.2 Newton Interpolation 8.1.3 Difficulties with Polynomial Interpolation 8.2 Hermite Interpolation 8.3 Rational-Function Interpolation. Lagrange Interpolation Polynomials.

Chapter 8 Interpolation (1)
E N D
Presentation Transcript
Chapter 8Interpolation (1) Copyleft 2005 by MediaLab
Table of Contents • 8.1 Polynomial Interpolation • 8.1.1 Lagrange Interpolation • 8.1.2 Newton Interpolation • 8.1.3 Difficulties with Polynomial Interpolation • 8.2 Hermite Interpolation • 8.3 Rational-Function Interpolation Copyleft 2005 by MediaLab
Lagrange Interpolation Polynomials • Basic concept • The Lagrange interpolating polynomial is the polynomial of degree n-1 that passes through the n points. • Using given several point, we can find Lagrange interpolation polynomial. Copyleft 2005 by MediaLab
General Form of Lagrange • The general form of the polynomial is p(x) = L1y1 + L2y2 + … + Lnyn where the given points are (x1,y1), ….. , (xn,yn). • The equation of the line passing through two points (x1,y1) and (x2,y2) is • The equation of the parabola passing through three points (x1,y1), (x2,y2), and (x3,y3) is • http://math.fullerton.edu/mathews/n2003/lagrangepoly/LagrangePolyProof.pdf Copyleft 2005 by MediaLab
Example of Lagrange Interpolation • Example • Given points (x1,y1)=(-2,4), (x2,y2)=(0,2), (x3,y3)=(2,8) Copyleft 2005 by MediaLab
MATLAB Function for Lagrange Interpolation • We can represent the Lagrange polynomial with coefficient ck. • p(x)=c1N1+c2N2+ … +cnNn Copyleft 2005 by MediaLab
Higher Order Interpolation Polynomials • Higher order interpolation polynomials x = [ -2 -1 0 1 2 3 4], y = [ -15 0 3 0 -3 0 15] Copyleft 2005 by MediaLab
Review and Discussion • In Lagrange interpolation polynomial, it always go through given points. Think with equation below • The Lagrange form of polynomial is convenient when the same abscissas may occur in different applications. • It is less convenient than the Newton form when additional data points may be added to the problem. Copyleft 2005 by MediaLab
Newton Interpolation Polynomials • Newton form of the equation of a straight line passing through two points (x1, y1) and (x2, y2) is • Newton form of the equation of a parabola passing through three points (x1, y1), (x2, y2), and (x3, y3) is • the general form of the polynomial passing through n points (x1, y1), …,(xn, yn) is Copyleft 2005 by MediaLab
Newton Interpolation Polynomials (cont’d) • Substituting (x1, y1) into • Substituting (x2, y2) into • Substituting (x3, y3) into Copyleft 2005 by MediaLab
Newton Interpolation Parabola • Passing through the points (x1, y1)=(-2, 4), (x2, y2)=(0, 2), and (x3, y3)=(2, 8). • The equations is • Where the coefficients are • thus Copyleft 2005 by MediaLab
Newton Interpolation Parabola (cont’d) • Passing through the points (x1, y1)=(-2, 4), (x2, y2)=(0, 2), and (x3, y3)=(2, 8). Copyleft 2005 by MediaLab
Additional Data Points • We extend the previous example, adding the points (x4, y4) = (-1, -1) and (x5, y5) = (1, 1) • Divided-difference table becomes (with new entries shown in bold) • Newton interpolation polynomial is Copyleft 2005 by MediaLab
Higher Order Interpolation Polynomials • Consider again the data from Example 8.4 with Lagrange form. x = [ -2 -1 0 1 2 3 4 ], y = [ -15 0 3 0 -3 0 15] • Do it again with Newton form. That the polynomial is cubic is clear. Copyleft 2005 by MediaLab
Higher Order Interpolation Polynomials (cont’d) • If the y values are modified slightly, the divided-difference table shows the small contribution from the higher degree terms: Copyleft 2005 by MediaLab
MATLAB functions – Finding the coefficients >> x = [-2 -1 0 1 2 3 4]; >> y = [-15 0 3 0 -3 0 15]; >> Newton_Coef(x,y); d = 15 -6 1 0 0 0 3 -3 1 0 0 0 -3 0 1 0 0 0 -3 3 1 0 0 0 3 6 0 0 0 0 15 0 0 0 0 0 >> function a = Newton_Coef(x, y) n = length(x); %Calculate coeffiecients of Newton interpolating polynomial a(1) = y(1); for k=1 : n-1 d(k,1) = (y(k+1) - y(k))/(x(k+1) - x(k)); %1st divided diff end for j=2 : n-1 for k=1 : n-j d(k,j) = (d(k+1,j-1) - d(k,j-1))/(x(k+j) - x(k)); %jth divided diff end end d for j=2:n a(j) = d(1, j-1); end Copyleft 2005 by MediaLab
MATLAB functions – Evaluate the polynomials >> a = [-15 15 -6 1 0 0 0]; >> x = [-2 -1 0 1 2 3 4]; >> t = [0 1 2]; >> Newton_Eval(t, x, a); t = 0 1 2 p = 3 0 -3 function p = Newton_Eval(t,x,a) % t : input value of the polynomial (x) % x : x values of interpolating points % a : answer of previous MATLAB function, i.e, the coefficients of Newton polynomial. n = length(x); hold on; for i =1 : length(t) ddd(1) = 1; %Compute first term c(1) = a(1); for j=2 : n ddd(j) = (t(i) - x(j-1)).*ddd(j-1); % Compute jth term c(j) = a(j).*ddd(j); end; p(i) = sum(c); %plot(t(i),p(i)); grid on; end t p Copyleft 2005 by MediaLab
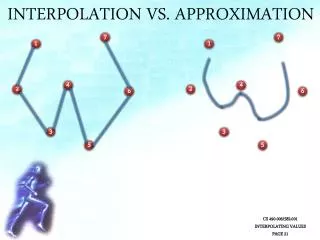
Humped and Flat Data • The data • x = [ -2 -1.5 -1 -0.5 0 – 0.5 1 1.5 2] • y = [ 0 0 0 0.87 1 0.87 0 0 0] illustrate the difficulty with using higher order polynomials to interpolate a moderately large number of points. Copyleft 2005 by MediaLab
Noisy Straight Line • The data • x = [ 0.00 0.20 0.80 1.00 1.20 1.90 2.00 2.10 2.95 3.00] • y = [ 0.01 0.22 0.76 1.03 1.18 1.94 2.01 2.08 2.90 2.95] • Not well suited with noisy straight line. Copyleft 2005 by MediaLab
Runge Function • The function is a famous example of the fact that polynomial interpolation does not produce a good approximation for some functions and that using more function values (at evenly spaced x values) does not necessarily improve the situation. • Example 1. • x = [ -1 -0.5 0.0 0.5 1.0 ] • y = [0.0385 0.1379 1.0000 0.1379 0.0385] Copyleft 2005 by MediaLab
Runge Function (cont’d) • Example 2. • x = [-1.000 -0.750 -0.500 -0.250 0.000 0.250 0.500 0.750 1.000 ] • y = [0.0385 0.0664 0.138 0.3902 1.000 0.3902 0.138 0.0664 0.0385] • The interpolation polynomial overshoots the true polynomial muchmore severely than the polynomial formed by using only five points. Copyleft 2005 by MediaLab
8.2Hermite Interpolation Copyleft 2005 by MediaLab
Hermite Interpolation • Hermite interpolation allows us to find a ploynomial that matched both function value and some of the derivative values Copyleft 2005 by MediaLab
More data for Product concentration Copyleft 2005 by MediaLab
MATLAB Code for Hermite interpolation Copyleft 2005 by MediaLab
Difficult Data • As with lower order polynomial interpolation, trying to interpolate in humped and flat regions cause overshoots. Copyleft 2005 by MediaLab
8.3Rational-Function Interpolation Copyleft 2005 by MediaLab
Rational-Function Interpolation • Why use rational-function interpolation? • Some functions are not well approximated by polynomials.(runge-function) • but are well approximated by rational functions, that is quotients of polynomials. Copyleft 2005 by MediaLab
Bulirsch-Stoer algorithm • Bulirsch-Stoer algorithm • The approach is recursive, based on tabulated data(in a manner similar to that for the Newton form of polynomial interpolation). • Given a set of m+1 data points (x1,y1), … , (xm+1, ym+1), we seek an interpolation function of the form <Bulirsch-Stoer algorithm general pattern> The proof is in J.Stoer and R.Bulirsch, 'Introduction to Numerical Analysis' Copyleft 2005 by MediaLab
Bulirsch-Stoer algorithm(cont’d) • Bulirsch-Stoer method for three data points Copyleft 2005 by MediaLab
Third stage Second stage data First stage x1 y1 R1= y1 x2 y2 R2= y2 x3 y3 R3=y3 x4 y4 R4=y4 x5 y5 R5=y5 Bulirsch-Stoer algorithm(cont’d) • Bulirsch-Stoer method for five data points Copyleft 2005 by MediaLab
Fifth stage Forth stage Bulirsch-Stoer algorithm(cont’d) Copyleft 2005 by MediaLab
Bulirsch-Stoer Rational-Function(cont’d) Copyleft 2005 by MediaLab
Example 8.13 rational-function interpolation data points: x = [-1 -0.5 0.0 0.5 1.0] y = [0.0385 0.1379 1.0000 0.1379 0.0385] Copyleft 2005 by MediaLab
Example 8.13 rational-function interpolation(cont’d) Copyleft 2005 by MediaLab