Real-time Positioner Electronics with LVDS Control for Up to 114 Motors
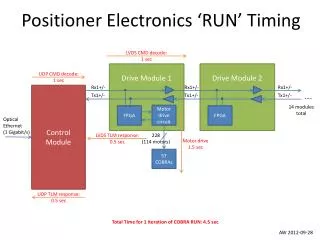
This document outlines a sophisticated drive module system designed for real-time positioner electronics, utilizing LVDS commands for motor control. The system features 14 distinct modules and manages communication through UDP, achieving a response time of 0.5 seconds for both timing and motor drive operations. Each iteration of the COBRA run is executed in 4.5 seconds, facilitating precise control over 114 motors. Utilizing FPGA technology and Optical Ethernet at 1 Gigabit/s, our design promises enhanced performance and reliability for complex positioning tasks.

Real-time Positioner Electronics with LVDS Control for Up to 114 Motors
E N D
Presentation Transcript
Positioner Electronics ‘RUN’ Timing LVDS CMD decode: 1 sec Drive Module 1 Drive Module 2 UDP CMD decode: 1 sec Rx1+/- Rx1+/- Rx1+/- Control Module …. Tx1+/- Tx1+/- Tx1+/- 14 modules total Motor drive circuit FPGA FPGA Optical Ethernet (1 Gigabit/s) LVDS TLM response: 0.5 sec 228 (114 motors) Motor drive 1.5 sec 57 COBRAs UDP TLM response: 0.5 sec Total Time for 1 iteration of COBRA RUN: 4.5 sec AW 2012-09-28