Runge 4 th Order Method
Runge 4 th Order Method. Industrial Engineering Majors Authors: Autar Kaw, Charlie Barker http://numericalmethods.eng.usf.edu Transforming Numerical Methods Education for STEM Undergraduates. Runge-Kutta 4 th Order Method http://numericalmethods.eng.usf.edu. Runge-Kutta 4 th Order Method.

Runge 4 th Order Method
E N D
Presentation Transcript
Runge 4th Order Method Industrial Engineering Majors Authors: Autar Kaw, Charlie Barker http://numericalmethods.eng.usf.edu Transforming Numerical Methods Education for STEM Undergraduates http://numericalmethods.eng.usf.edu
Runge-Kutta 4th Order Methodhttp://numericalmethods.eng.usf.edu
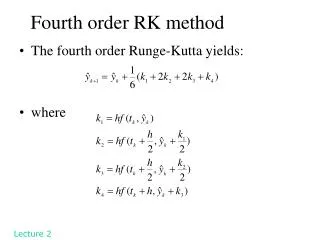
Runge-Kutta 4th Order Method For Runge Kutta 4th order method is given by where http://numericalmethods.eng.usf.edu
How to write Ordinary Differential Equation How does one write a first order differential equation in the form of Example is rewritten as In this case http://numericalmethods.eng.usf.edu
Example The open loop response, that is, the speed of the motor to a voltage input of 20 V, assuming a system without damping is If the initial speed is zero , and using the Runge-Kutta 4th order method, what is the speed at t = 0.8 s? Assume a step size of h = 0.4 s. http://numericalmethods.eng.usf.edu
Solution Step 1: For http://numericalmethods.eng.usf.edu
Solution Cont is the approximate speed of the motor at http://numericalmethods.eng.usf.edu
Solution Cont Step 2: http://numericalmethods.eng.usf.edu
Solution Cont is the approximate speed of the motor at http://numericalmethods.eng.usf.edu
Solution Cont The exact solution of the ordinary differential equation is given by The solution to this nonlinear equation at t=0.8 seconds is http://numericalmethods.eng.usf.edu
Comparison with exact results Figure 1. Comparison of Runge-Kutta 4th order method with exact solution http://numericalmethods.eng.usf.edu
Effect of step size Table 1 Values of speed of the motor at 0.8 seconds for different step sizes (exact) http://numericalmethods.eng.usf.edu
Effects of step size on Runge-Kutta 4th Order Method Figure 2. Effect of step size in Runge-Kutta 4th order method http://numericalmethods.eng.usf.edu
Comparison of Euler and Runge-Kutta Methods Figure 3. Comparison of Runge-Kutta methods of 1st, 2nd, and 4th order. http://numericalmethods.eng.usf.edu
Additional Resources For all resources on this topic such as digital audiovisual lectures, primers, textbook chapters, multiple-choice tests, worksheets in MATLAB, MATHEMATICA, MathCad and MAPLE, blogs, related physical problems, please visit http://numericalmethods.eng.usf.edu/topics/runge_kutta_4th_method.html
THE END http://numericalmethods.eng.usf.edu