Reactive Trajectory Tracking For Mobile Robots Based on Non Linear Model Predictive Control
30 likes | 259 Vues
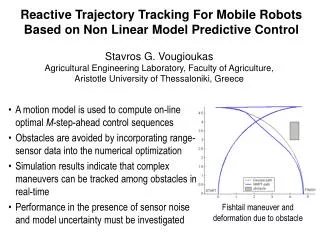
Reactive Trajectory Tracking For Mobile Robots Based on Non Linear Model Predictive Control. Stavros G. Vougioukas Agricultural Engineering Laboratory, Faculty of Agriculture, Aristotle University of Thessaloniki, Greece.

Reactive Trajectory Tracking For Mobile Robots Based on Non Linear Model Predictive Control
E N D
Presentation Transcript
Reactive Trajectory Tracking For Mobile Robots Based on Non Linear Model Predictive Control Stavros G. VougioukasAgricultural Engineering Laboratory, Faculty of Agriculture, Aristotle University of Thessaloniki, Greece • A motion model is used to compute on-line optimal M-step-ahead control sequences • Obstacles are avoided by incorporating range-sensor data into the numerical optimization • Simulation results indicate that complex maneuvers can be tracked among obstacles in real-time • Performance in the presence of sensor noise and model uncertainty must be investigated Fishtail maneuver and deformation due to obstacle