SLIDE 14 -A Transformação de Perspectiva
SLIDE 14 -A Transformação de Perspectiva. Figura 5 - O plano mostrando detalhes da projeção em perspectiva.

SLIDE 14 -A Transformação de Perspectiva
E N D
Presentation Transcript
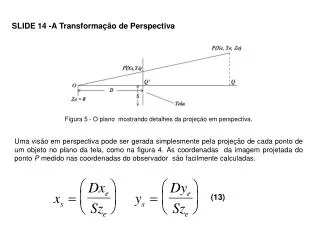
SLIDE 14 -A Transformação de Perspectiva Figura 5 - O plano mostrando detalhes da projeção em perspectiva. Uma visão em perspectiva pode ser gerada simplesmente pela projeção de cada ponto de um objeto no plano da tela, como na figura 4. As coordenadas da imagem projetada do ponto P medido nas coordenadas do observador são facilmente calculadas. (13)
SLIDE 15 -A Transformação de Perspectiva Alternativamente, podemos converter para coordenadas de tela, incluindo uma especificação da localização da janela pela qual a imagem é mostrada (14) Os quatro parâmetros são dados em notação “center-size”: a janela está centrada em , tem unidades de altura e unidades de largura. Estes quatro parâmetros podem ser determinados a partir dos parâmetros da janela de visualização. A transformação de perspectiva é fundamentalmente diferente daquela para rotação, translação e mudança de escala: ela envolve divisão pelo valor da coordenada , enquanto as outras envolvem apenas multiplicações e adições. Gerar uma imagem em perspectiva verdadeira, requer divisão pela profundidade de cada ponto.
S Imagem Vista 2 Vista 1 D1 D2 . Se a razão D/S for pequena, abertura será “ampla” e produzirá imagens similares àquelas de ângulo aberto. . Uma razão D/S grande especifica uma abertura “estreita” correspondendo a vistas do tipo “telefoto”
Uma razão D/S grande especifica uma abertura “estreita” correspondendo a vistas do tipo “telefoto” como a foto acima Se a razão D/S for pequena, abertura será “ampla” e produzirá imagens similares àquelas de ângulo aberto como a foto acima
SLIDE 16 – Clipping tridimensional É possível demonstrar que: (14)
SLIDE 17 – Clipping tridimensional Por conveniência da tarefa de recorte, definiremos um novo sistema de coordenadas, “o sistema de coordenadas de clipping”, em função do sistema de coordenadas do observador (14) Onde
SLIDE 17 – Clipping tridimensional Reescrevedo a equação 14 (14)
SLIDE 18 - Visão em perspectiva de um cubo Considere um cubo centrado na origem do sistema de coordenadas do “mundo”, definido pelos seguintes pontos e linhas Vamos observar este cubo a partir do ponto (6,8,7.5), com o eixo de visualização apontando diretamente para a origem do sistema de coordenadas do “mundo”. Existe ainda um grau de liberdade sobrando, que é uma rotação arbitrária em torno do eixo : vamos assumir que o eixo está no plano z = 7.5.
SLIDE 19 - Visão em perspectiva de um cubo Figura 10 - Cinco passos para realizar a transformação de visualização: (a) Translação; (b) Rotação em torno do eixo x; (c) Rotação em torno do eixo y; (d) Rotação em torno do eixo x; (e) Invertendo o eixo z.
1) O sistema de coordenadas é transladado para (6,8,7.5), como mostrado na figura (a). O ponto (6,8,7.5) no sistema de coordenadas original passa a ser a origem: Operação desejada Matriz Translação Resultando Note que usamos a operação inversa (-6, -8, -7.5)
2) Rotação de -90 do sistema de coordenadas em torno do eixo “x’”, como mostrada na figura (b). Observe que, devido à utilização da transformação inversa, substituímos = 90na equação de rotação em torno do eixo “x”. Operação desejada Matriz de Rotação de um ângulo , em torno de do eixo X Resultando
3) Rotação em torno do eixo y’ , de um ângulo , tal que o eixo z’ fique na direção do eixo z (embora no sentido contrário), como mostrado na figura (c). Novamente devemos utilizar a transformação inversa. Operação desejada Matriz de Rotação de um ângulo , em torno de do eixo Y Resultando
4) Rotação em torno do eixo X’ , de um ângulo , tal que a origem do sistema de coordenadas original fique sobre o eixo , como mostrado na figura (d). Novamente devemos utilizar a transformação inversa. Operação desejada Matriz de Rotação de um ângulo , em torno de do eixo X Resultando
5) Finalmente, invertendo o sentido do eixo z , de modo a criar um sistema de coordenadas de “mão-esquerda”, de acordo com as convenções do sistema de coordenadas do observador, como mostrado na figura (e). Uma matriz de mudança de escala é utilizada. Esta operação completa as cinco transformações primitivas necessárias para estabelecer a transformação de visualização. Operação desejada Matriz de Mudança de escala Resultando
Suponha que desejamos preencher uma tela de 30 cm x 30 cm, desenhada para ser vista de uma distância de 60 cm, e cujo o sistema de coordenadas da tela vai de 0 a 1023. Assim, D = 60, S = 15, e a transformação resultante será
SLIDE 21 - Visão em perspectiva de um cubo e a equação 18 passa a ser (23) Todos os detalhes das transformações já foram especificados. Cada vértice do cubo é transformado pela matriz VN, sofre um processo de “clipping”, e convertido para coordenadas de tela usando-se a equação 23.
SLIDE 22 - Visão em perspectiva de um cubo Podemos agora aplicar esta transformação aos oito vértices do cubo:
SLIDE 23 - Visão em perspectiva de um cubo Apesar da necessidade da rotina de “clipping” ser aplicada a cada linha no cubo, está aparente na tabela que todos os vértices estão dentro da pirâmide de visualização, e o algoritmo de “clipping” irá aceitar trivialmente todas as linhas. As coordenadas de tela das extremidades das linhas são calculadas com a equação 23, e as linhas são desenhadas como mostrado na figura 11. Figura 11 - A visão em perspectiva do cubo, gerada pelos cálculos do exemplo do texto.