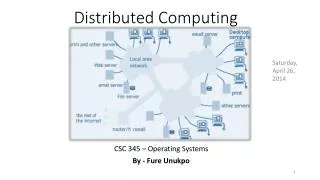
Distributed Computing
Introduction to Operating Systems: Module 17. Distributed Computing. Distributed Computing. Process Management Scheduling Synchronization Deadlock Message Passing Send/receive Publish/subscribe (message bus) Remote Procedure Calls Stub/skeleton Registration. Scheduling. Explicit

Distributed Computing
E N D
Presentation Transcript
Introduction to Operating Systems: Module 17 Distributed Computing
Distributed Computing • Process Management • Scheduling • Synchronization • Deadlock • Message Passing • Send/receive • Publish/subscribe (message bus) • Remote Procedure Calls • Stub/skeleton • Registration
Scheduling • Explicit • The application programmer is responsible for assigning a computer to the schedulable unit • Transparent • The OS seamlessly assigns a computer to the schedulable unit • Normally this is the only computer which executes the work until it is completed • Load Balancing • Migrate processes to improve performance • The cost of migration is steep!
Process Migration • Transfer of sufficient amount of the state of a process from one machine to another • The process executes on the target machine • Load sharing • Move processes from heavily loaded to lightly load systems • Load can be balanced to improve overall performance • Communications performance • Processes that interact intensively can be moved to the same node • Move process to where the data reside when the data is large • Availability • Long-running process moves when its machine will be down
Initiation of Migration • Operating system • When goal is load balancing • Process • When goal is to reach a particular resource • Hardware • Data • Another process • What is Migrated? • Must destroy the process on the source system and create it on the target system • Process control block and any links must be moved
What is Migrated? • Eager (all):Transfer entire address space • No trace of process is left behind • If address space is large and if the process does not need most of it, then this approach my be too expensive • Precopy: Process continues to execute on the source node while the address space is copied • Pages modified on the source during precopy operation have to be copied a second time • Reduces the time that a process is frozen and cannot execute during migration
What is Migrated? • Eager (dirty): Transfer only that portion of the address space that is in main memory and have been modified • Additional virtual pages are transferred on demand • Source machine is involved for the life of the process • Copy-on-reference: Pages are only brought over on reference • Variation of eager (dirty) • Has lowest initial cost of process migration
Negotiation of Migration • Migration policy is responsibility of Starter utility • Starter utility is also responsible for long-term scheduling and memory allocation • Decision to migrate must be reached jointly by two Starter processes (one on the source and one on the destination)
Eviction • System evict a process that has been migrated to it • If a workstation is idle, process may have been migrated to it • Once the workstation is active, it may be necessary to evict the migrated processes to provide adequate response time
Synchronization • Time-stamped messages • Each message contains local time of its source • Time of receipt is combined with the time stamp to determine relative order of activities • What if local times are out of synch? • Use a virtual time stamp • Lamport, Ricart algorithms • Semaphore without shared memory • More complicated than we are prepared to address in an undergraduate course
Distributed Mutual Exclusion (DME) • Uses timed stamped messages • Lamport's timestamp, Ricart's algorithm • Assumptions • The system consists of n processes; each process Piresides at a different processor • Each process has a critical section that requires mutual exclusion • Requirement • If Pi is executing in its critical section, then no other process Pj is executing in its critical section
Time-Stamping • Each system on the network maintains a counter which functions as a clock • Each site has a numerical identifier • When a message is received, the receiving system sets is counter to one more than the maximum of its current value and the incoming time-stamp (counter)
Time-Stamping • If two messages have the same time-stamp, they are ordered by the number of their sites • For this method to work, each message is sent from one process to all other processes • Ensures all sites have same ordering of messages • For mutual exclusion and deadlock all processes must be aware of the situation
DME: Fully Distributed Approach • When process Piwants to enter its critical section, it generates a new timestamp, TS, and sends the message request (Pi, TS) to all other processes in the system. • TS = MAX(TS_ARRAY) + 1 • Like bakery algorithm • When process Pjreceives a request message, it may reply immediately or it may defer sending a reply back • When process Pi receives a reply message from all other processes in the system, it can enter its critical section • After exiting its critical section, the process sends reply messages to all its deferred requests
DME: Fully Distributed Approach • The decision whether process Pjreplies immediately to a request(Pi, TS) message or defers its reply is based on three factors: • If Pj is in its critical section, then it defers its reply to Pi • If Pj does not want to enter its critical section, then it sends a reply immediately to Pi • If Pj wants to enter its critical section but has not yet entered it, then it compares its own request timestamp with the timestamp TS • If its own request timestamp is greater than TS, then it sends a reply immediately to Pi (Piasked first) • Otherwise, the reply is deferred
Benefits of Fully Distributed Approach • Freedom from deadlock is ensured • Freedom from starvation is ensured, since entry to the critical section is scheduled according to the timestamp ordering. The timestamp ordering ensures that processes are served in a first-come, first served order. • The number of messages per critical-section entry is 2 x (n – 1) • This is the minimum number of required messages per critical-section entry when processes act independently and concurrently
Three Undesirable Consequences • The processes need to know the identity of all other processes in the system, which makes the dynamic addition and removal of processes more complex • If one of the processes fails, then the entire scheme collapses • This can be dealt with by continuously monitoring the state of all the processes in the system • Processes that have not entered their critical section must pause frequently to assure other processes that they intend to enter the critical section • This protocol is therefore suited for small, stable sets of cooperating processes
Deadlock in Resource Allocation • Mutual exclusion • Hold and wait • No preemption • Circular wait
Deadlock Prevention • Circular-wait condition can be prevented by defining a linear ordering of resource types • Hold-and-wait condition can be prevented by requiring that a process request all of its required resource at one time, and blocking the process until all requests can be granted simultaneously
Deadlock Avoidance • Distributed deadlock avoidance is impractical • Every node must keep track of the global state of the system • The process of checking for a safe global state must be mutually exclusive • Checking for safe states involves considerable processing overhead for a distributed system with a large number of processes and resources
Distributed Deadlock Detection • Each site only knows about its own resources • Deadlock may involve distributed resources • Centralized control – one site is responsible for deadlock detection • Hierarchical control – lowest node above the nodes involved in deadlock • Distributed control – all processes cooperate in the deadlock detection function
Message Passing • Send/Receive paradigm • Works much the same as in single system • Can be synchronous or asynchronous • Publish/Subscribe • Agents publish (broadcast) messages to “subjects” • Agents subscribe to subjects • Normally asynchronous, with little fault tolerance
Sockets • Defined as an “endpoint for communication” • Concatenation of IP Address + Port • All Ports < 1024 are considered “well-known” - TELNET uses port 23 - FTP uses port 21 - HTTP server uses port 80
Remote Procedure Calls (RPC) • Sockets are considered low-level. • RPCs offer a higher-level form of communication • Client makes procedure call to “remote” server using ordinary procedure call mechanisms
Remote Method Invocation (RMI) • Java’s OO version of RPCs • A thread may invoke a method on a remote object • An object is considered “remote” if it resides in a separate Java Virtual Machine
RPC versus RMI • RPC’s Support Procedural Programming Style • RMI Supports Object-Oriented Programming Style • Parameters to RPCs are Ordinary Data Structures • Parameters to RMI are Objects
Stubs and Skeletons • “Stub” is a proxy for the remote object – resides on client • The stub “marshalls” the parameters and sends them to the server • “Skeleton” is on server side • Skeleton “unmarshalls” the parameters and delivers them to the server
Local (non-remote) objects are passed by copy using object serialization Remote objects are passed by reference Remote objects are declared by specifying an interface that extends java.rmi.Remote Every method must throw java.rmi.RemoteException Marshalling Parameters
CORBA • RMI is Java-to-Java Technology • CORBA is middleware that allows heterogeneous client and server applications to communicate • Interface Definition Language (IDL) is a generic way to describe an interface to a service a remote object provides • Object Request Broker (ORB) allows client and server to communicate through IDL. • Internet InterORB Protocol (IIOP) is a protocol specifying how the ORBs can communicate.
Registration Services • Registration Service Allows Remote Objects to “register” Their Services. • RMI, CORBA Require Registration Services