A humanoid upper body system for two-handed manipulation
10 likes | 207 Vues
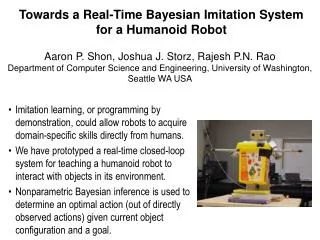
A humanoid upper body system for two-handed manipulation. Ch. Borst, Ch. Ott, T. Wimböck, B. Brunner, F. Zacharias, B. Bäuml, U. Hillenbrand, S. Haddadin, A. Albu-Schäffer, G. Hirzinger Institute of Robotics and Mechatronics German Aerospace Center (DLR), Germany.

A humanoid upper body system for two-handed manipulation
E N D
Presentation Transcript
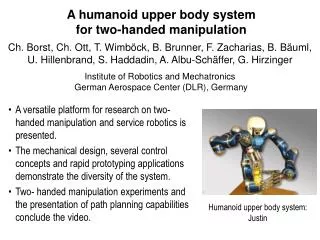
A humanoid upper body system for two-handed manipulation Ch. Borst, Ch. Ott, T. Wimböck, B. Brunner, F. Zacharias, B. Bäuml, U. Hillenbrand, S. Haddadin, A. Albu-Schäffer, G. Hirzinger Institute of Robotics and Mechatronics German Aerospace Center (DLR), Germany • A versatile platform for research on two-handed manipulation and service robotics is presented. • The mechanical design, several control concepts and rapid prototyping applications demonstrate the diversity of the system. • Two- handed manipulation experiments and the presentation of path planning capabilities conclude the video. Humanoid upper body system: Justin