Download
1 / 30
300 likes | 429 Vues
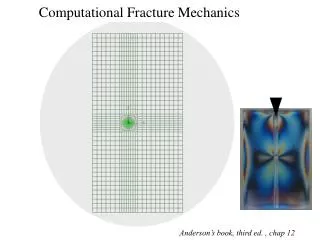
Computational Mechanics of ECAs, and Machine Metrics. Elementary Cellular Automata. 1d lattice with N cells (periodic BC) Cells are binary valued {1,0} -- B or W Deterministic update rule, , applied to all cells simultaneously to determine cell values at next time step.

E N D
Elementary Cellular Automata • 1d lattice with N cells (periodic BC) • Cells are binary valued {1,0} -- B or W • Deterministic update rule, , applied to all cells simultaneously to determine cell values at next time step. • nearest neighbor interactions only
Example - Rule 54 000001010011100101110111 0 1 1 0 1 1 0 0
Typical Behavior of ECAs • Emergence of “Domains” -- spatially homogeneous regions that spread through lattice as time progresses. • Largely independent of lattice size N, for N big. • Depends (sensitively) on update rule .
Characterizing ECA Behavior Domains can be characterized by their state transition machines (DFAs). Rule 18 (0W)* Rule 54 (1110)* 1 0,1 A B A B 1 0 D C 0 1
Formally Defining Domains • Since each ECA Domain can be characterized by a DFA, domains are regular languages. • Def: a (spatial)domain or (spatial)domain language is a regular langauge s.t. (1) () = or p() = , for some p. (temporal invariance). (2) Process graph of is strongly connected (spatial homogeneity).
Temporal Invariance? • Question: Given a potential domain, , with corresponding DFA, M, how do we determine temporal invariance? Can this even be done in general? • Answer: Yes, but somewhat involved. Steps are: (1) Encode CA update rule as a Transducer, T. (2) Take compositionT(M) = T’ (3) Use T’ to construct M’ = [T]out (4) Check if M’ = M
How to Determine Domains • Visual Inspection in simple cases (#54) • Epsilon Machine Reconstruction • Fixed Point Equation
-Machine Reconstruction Several Difficulties: • ‘Experimental’ spatial data does not consist entirely of domain regions. Must sort out true transitions from anomalies. • May be multiple domains • Pattern may be spatio-temporal not simply spatial.
Results • Good for entirely periodic spatial patterns, which are temporally fixed. • Can reconstruct some spatial domains with indeterminancy e.g. Rule 18 = (0W)* , Rule 80. • Can reconstruct some period 2 domains e.g. Rule 54. • In general, difficulties for domains with lots of ‘noise’, non-block processes, low transition probabilities, and spatio-temporal processes.
Questions from Demos • How to analyze patterns in space-time? • Minimal invariant sets - domains within domains e.g. 000… in rule 18. • What does it mean for a domain to be stable or attracting? • Particles and transient dynamics?
Unit Perturbation DFAs • The unit perturbation language L’ of L is L’ = { w’ s.t. w in L s.t. d(w’,w) 1} • Note: L regular L’ regular L process L’ process
Attractors • A regular language L is a fixed point attractor for a CA, , if (1) (L) = L (2) n(L’) L’, for all n (3) For ‘almost every’ w in L’ , n(w) is in L, for some n • Note: If p(L) = L, but (L) L then (Lp) = Lp where Lp = {L, (L), 2(L) … p-1(L) }. And also Lp is regular. Hence, we may assume L is a fixed point and not p-periodic. The attractor is then not necessarily spatially homogeneous at each time step. It is NOT a single spatial domain, but rather a union of spatial domains each of which is periodic in time.
Comments on Attractor Definition • This definition ensures that domain grows instead of shrinking in time at the domain/other stuff interface. • Finite time collapse onto (NOT close to) the attractor is different for CAs then in spatially continuous systems such as DEQs or 1d-maps because you can’t ‘get within ’ without being equal, due to discreteness.
Comparison of ECAs • Can (sort of) characterize behavior of an individual ECA. • Can we compare the behavior of two different ECAs and measure how similar their dynamics are? And How? • For example, in what sense is ECA 9 similar to ECA 25 (and how similar)?
Basic Strategy • Consider only asymptotic spatial patterns. • Ignore particles, transient dynamics, and even temporal patterns. • Compare ECAs based only upon the domain machines M1,M2. Create ‘machine metrics’. ** Note: This is now a somewhat more general question because such metrics could be used to compare -machines for other types of processes as well.
Distinguishing Between Sources I #18 (0W)* #54 (1110)* #54 (0001)* #160 (0)*
Distinguishing Between Sources II #18 (0W)* # 80 (1,0,W)* RR-XOR
Machine Metrics I Let M1, M2 be two machines with corresponding languages L1, L2 and Let p1,n(w), p2,n(w) be the probability mass function of words of length n for the languages L1, L2. We define … dn,1(M1,M2) = w|p1,n(w) - p2,n(w)| dn,2(M1,M2) = (w|p1,n(w) - p2,n(w)|2)1/2 dn,(M1,M2) = Max|p1,n(w) - p2,n(w)| Consider weighted Averages: D(M1,M2) = n dn(M1,M2)*n , 0 < < 1
Problems with Lp Metrics • dn,(M1,M2) 0, as n and dn,2(M1,M2) 0, as n for M1, M2 with h(M1)> 0, h(M2) > 0. • dn,1(M1,M2) 2 as n for any M1, M2 with h(M1) h(M2) ** Note: 2 is the maximum value for any of these metrics.**
The Hausdorff Metric Let (X,d) be a metric space, define the Hausdorff metric between compact subsets of X by • (A,B) = Max Min d(a,b) • (B,A) = Max Min d(a,b) • dH(A,B) = Max {(A,B) , (B,A) } a b b a
Examples (A,B) (B,A) A B A B (A,B) dH(A,B) =(A,B) = (B,A) dH(A,B) =(A,B), (B,A) = 0
Machine Metrics II Let M1, M2 be two machines with corresponding languages L1, L2. • Hausdorff ‘metric’ on length n words • dn,H(M1,M2) = dH(L1,n, L2,n) • Averaged Min Distance “metric” on length n words • (M1,M2) = (w1 min d(w1,w2))/|L1,n| • (M2,M1) = (w2 min d(w1,w2))/ |L2,n| • dn,A(M1,M2) = Max {(M1,M2) , (M2,M1) } w2 w1 ** Can take weighted averages or lim n dn,H(M1,M2)**
Example - ECA 18 and 3 periodic Domains #18 (0W)* #54 (1110)* #54 (0001)* #160 (0)*
Example - ECA 18 and 3 non-periodic Domains #18 (0W)* # 80 (1,0,W)* RR-XOR
ECA 25 vs. ECA 9 d1 = 0.6 dH = 0.2 d-AMD = 0.08 25 9
d1 = 0.883 dH = 0.2 d-AMD = 0.092 RR0 vs. RR-XOR RR0 RR-XOR