Download
1 / 16
170 likes | 431 Vues
Autonomous Tracking Vehicle (ATV). Team RC Bobby Labonte Dale Earnhardt Rusty Wallace Jeff Gordon. Project Description. Problem: To design a mobile robot that locates and follows a designated target Self-contained vehicle, controlled by Motorola 68HC11 microprocessor

E N D
Autonomous Tracking Vehicle(ATV) Team RC Bobby Labonte Dale Earnhardt Rusty Wallace Jeff Gordon
Project Description Problem: To design a mobile robot that locates and follows a designated target • Self-contained vehicle, controlled by Motorola 68HC11 microprocessor • Uses sensors to track target • Software acts in real-time
Technical Specifications • ATV is self-contained and runs on an internal power supply • Sensors will detect target up to 10 feet away • ATV maintains a distance of approximately 36”- 48” from target • Takes measures to avoid collisions
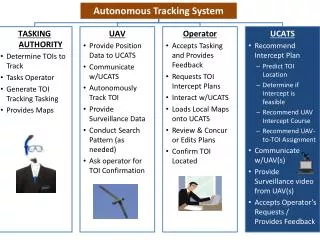
System Block Diagram Header Connectors Communications Link to PC Expansion Board Finger Board Analog/ Digital Inputs Motor Controllers Interactive C programming environment DC Motors (RC Car) Sensors Controller Software Overall System Block Diagram
HardwareSolution • Expansion Board • Digital/Analog Ports • Sonar Interface • Motor Drivers • IR Transmitters and Receivers
2 Digital Switches Main Motor Output Finger Board Interface Motor Driver Chips Sonar/Motor Power Connection 8 Analog Ports Servo Motor Output 6 Digital Ports Sonar Connection Expansion Board Layout
Sonar Connection 8 Analog Ports Servo Motor Output 6 Digital Ports Sonar/Motor Power Connection Motor Driver Chips 2 Digital Switches Finger Board (Motorola 68HC11) Main Motor Output Expansion Board Layout
Timer Chip Infrared Emitters Lead Car • Infrared Beacon • Modulated at 40kHz
Sensors Placement of Sonar and IR Receivers
Regulator IR IR Tracking Behavior Arbiter Motor Outputs Sonar Speed Management Behavior Decomposition of behaviors in the ATV Software Solution Flow of sensor inputs to actuator outputs
Test Plan • Power up vehicle and initialize tracking program. • Move target laterally and verify IR tracks beacon. • Adjust target distance and verify that sonar maintains desired gap. • Combine the above procedures to test proper tracking.
Budget • Estimated cost of labor: $17,130 • Total cost of parts: $690.53 • Estimated Cost of Project: $17,820
Project/Management Analysis • What we would do different: • More sensor research and experimentation • More thorough PCB layout verification