Download
1 / 49
490 likes | 633 Vues
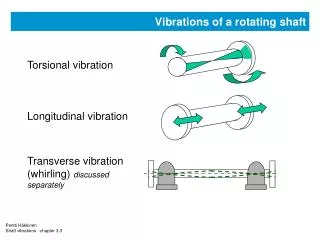
Physique 3 Vibrations Linéaires et Ondes Mécaniques. Leçon n°2 Composantes Elémentaires des Systèmes Vibratoires. Présentation du cours.

E N D
Physique 3Vibrations Linéaires et Ondes Mécaniques Leçon n°2Composantes Elémentaires des Systèmes Vibratoires
Présentation du cours En pratique, la majorité des systèmes vibratoires mécaniques sont très complexes. Ce sont des systèmes dynamiques pour lesquels les variables telles que les forces d’excitation et les réponses du système sont dépendantes du temps. On considère en général juste les aspects les plus importants pour analyser et prédire le comportement d’un système. Prenez l’exemple d’une voiture qui roule sur une route ondulée. On peut la modéliser comme un ensemble de masses, de ressorts et d’amortisseurs. La force d’excitation extérieur sera les ondulations de la route, la réponse sera les secousses que l’on ressent lorsqu’on voyage dans cette voiture et le confort qu’elle offre dans ce sens. En général; après avoir mis en place un modèle physique, on écrit les équations qui gouvernent notre modèle, on résout ces équations et on interprète les résultats. Parmi les exemples physiques que nous allons modéliser, il y’a le corps humain, un conducteur de moto sur une route ondulée, une poutre, une bâtisse de type château d’eau, un bâtiment à étages qui peut être sujet aux vibrations d’un tremblement de terre et des ensembles mécaniques utilisées dans des moteurs et dans l’industrie. Il est clair que dans un système vibratoire complexe, la modélisation va inclure des opérations telles que comment combiner des ressorts qu’ils soient en série ou en parallèle, comment combiner des masses et combiner des amortisseurs. Ils nous faut aussi avoir des notions de mécanique du solide telles que comment évaluer la masse d’un objet de forme complexe, où se trouve son centre de gravité, comment calculer le moment d’inertie de cette masse. Quelle est l’énergie cinétique du système? Quelle est son énergie potentielle? Sommes-nous en présence d’un système vibratoire? Quelles sont les conditions pour que le système vibre? Ce sont ces opérations que nous allons étudier dans cette leçon que nous avons intitulé : « Composantes Elémentaires des systèmes vibratoires mécaniques ».
Composantes élémentaires des systèmes vibratoires mécaniques • Exemples de systèmes vibratoires • Les ressorts • Les masses • Les amortisseurs • Mécanique classique des mouvements vibratoires
Exemple de système vibratoire :Moto avec un conducteur sur une route gondolée
Assimilation à un système masse-ressort, • Une poutre : (a) Système actuel (b) Modèle à un degré de liberté (b) Modèle à un degré de liberté • Déflection statique ou position d’équilibre de la poutre de longueur ℓ : où P=mg, E est le module d’Young et I le moment d’inertie de la section A de la poutre. • La constante du ressort équivalente est donc : • Une tige soumise à une charge axiale : • où A est la section; ℓ la longueur et E le module d’Young qui dépend du matériau utilisé.
Assimilation à un système masse-ressort« Spaceneedle, Seattle »
Assimilation à un système masse-ressortConstruction de buildings (a) Modélisation d’une construction
Exemple de modélisation d’ensemble mécaniques Culbuteur (masse mc et moment d’inertie Jc) Bielle (masse mb) Ressort de valve Valve masse mv Roulement Came Système arbre-came-bielle-culbuteur-valve Arbre Modèle simplifié d’une installation de pompage à pétrole
Exemple de modélisation en biomécanique la course et la natation (b) Phases de traction et de poussées des techniques de nage modernes (a) La course
Composantes élémentaires des systèmes vibratoires mécaniques • Exemples de systèmes vibratoires • Les ressorts • Les masses • Les amortisseurs • Mécanique classique des mouvements vibratoires
Ressorts en parallèle • Pour n ressorts en parallèle :
Ressorts en série • Pour n ressorts en série :
Exemple 1 : Constante Équivalente d’un Système de Ressorts (1) • Énoncé : utiliser l’équivalence de l’énergie potentielle pour trouver la constante de torsion équivalente de la figure. • Pour ce qui est des cylindres de torsion de constante kt1, kt2, kt3 et kt4, ils contribuent tous à faire tourner le disque de rayon R, ceux-ci se comportent donc comme des ressorts de torsion en série de force de rappel Kt et d’énergie potentielle Attention, Kt n’a pas les mêmes dimensions que les constantes de ressort simples.
Exemple 1 : Suite Solution : • Énergie potentielle totale du système : • Calcul de cette énergie : d’où :
Exemple 2 : Modélisation d’une grue Enoncé : La flèche AB de la grue de la figure est une barre uniforme d’acier de longueur 10 mètres et de surface de section 2500mm². un poids P est suspendu pendant que la grue est stationnaire. Le câble CDEBF est fait en acier et a une surface de section de 100 mm². en négligeant les effets du câble CDEB, trouver la constante du ressort du système équivalent dans la direction verticale.
Exemple 2 : Modélisation d’une grue Solution : • Les ressorts de la flèche et du câble se déforment de : • La longueur du câble ℓ1 et l’angle sont donnés par :
Composantes élémentaires des systèmes vibratoires mécaniques • Exemples de systèmes vibratoires • Les ressorts • Les masses • Les amortisseurs • Mécanique classique des mouvements vibratoires
Combinaison de Masses en Translation Masses en translation connectées par unebarrerigide • Avec • En égalant les énergies cinétiques, on trouve : • Qui donnent :
Combinaison de masses couplées en translation et en rotation Pignon, moment d’inertie J0 Masses translationnelles et rotationnelles d’un arrangement pignon-crémaillère • Énergie cinétique des deux masses : et du système équivalent • En utilisant : ,T=Teq donne : • Masse rotationnelle équivalente :
Exemple 3 : Masse équivalente d’un système Arbre-Came-Bielle-Culbuteur-Valve Problème : Trouver la masse équivalente meq(1) de ce système en supposant la position de meq (1) au point A et (2) au point C.
Exemple 3 : Suite (1) • A cause des déplacements verticaux x de la bielle : • Le culbuteur pivote d’un angle • La valve se déplace vers le bas • Le centre de gravité du culbuteur se déplace vers le bas de • Énergie cinétique du système : • (1) si meq est la masse équivalente au point A
Exemple 3 : Suite (2) • En notant que • On obtient : • (2) meq est la masse équivalente au point C : • On obtient :
Composantes élémentaires des systèmes vibratoires mécaniques • Exemples de systèmes vibratoires • Les ressorts • Les masses • Les amortisseurs • Mécanique classique des mouvements vibratoires
Les Amortisseurs • L’énergie de vibration est convertie en chaleur ou en bruit. • Amortissement visqueux : la force d’amortissement est proportionnelle à la vitesse du corps vibrant : • Amortissement sec : la force de ralentissement est une grandeur constante : F=-N • Les amortisseurs peuvent être combinés en série ou en parallèle.
Amortisseurs en série • Lorsque une masse est soumise à deux amortisseurs en série, les vitesses s’ajoutent : • Les amortisseurs sont soumis à une même force : • Ce qui donne • Les deux amortisseurs en série : • La constante d’amortissement pour n amortisseurs en série :
Amortisseurs en parallèles • Les forces d’amortissement agissent directement sur la masse et s’ajoutent : • Pour n amortisseurs en parallèle :
Exemple 4 : Combinaison d’Amortisseurs • Énoncé : Trouver la constante d’amortissement équivalente dans les cas suivants : • 1- quand trois amortisseurs sont connectés à une barre rigide et l’amortisseur équivalent est à la position l1. • 2- Quand trois amortisseurs de torsion sont engrenés (fig.2) et l’amortisseur équivalent est à la position1. • On utilisera le fait que l’énergie dissipée par un amortisseur visqueux pendant une période est donnée par X2, où est la constante d’amortissement, la pulsation et X l’amplitude des oscillations. Figure 2 Figure 1
Exemple 4 : suite • 1- Énergie dissipée par les trois amortisseurs : • Qui donne • 2- Energie dissipée en une période • avec • On trouve
Composantes élémentaires des systèmes vibratoires mécaniques • Exemples de systèmes vibratoires • Les ressorts • Les masses • Les amortisseurs • Mécanique classique des mouvements vibratoires
Mécanique classique du solide pour les mouvements vibratoires • La masse totale du système est :
Centre d’inertie • Le centre d’inertie d’un système est le barycentre de tous les points M affectés des coefficients mi • Pour un système continue :
Moment d’inertie par rapport à un Axe • Moment d’inertie d’une masse tournant autour d’un cercle de rayon r : • Moment d’inertie par rapport à un axe d’un corps quelconque: • Moment d’inertie par rapport à ox, oy et oz :
Autres moments d’inertie • Moment d’inertie par rapport à un point O et par rapport à un plan p :
Théorème de Huygens ou théorème des axes parallèles • Les deux moments d’inertie s’écrivent • Nous avons qui donne
Exemple 5 : Centre d’inertie et moment d’inertie d’un solide Soit un solide indéformable constitué par la juxtaposition d’un hémisphère et d’un cône pleins et homogènes. On appellera mh la masse de l’hémisphère et mc la masse du cône. Soit G le centre d’inertie du solide. On appellera G1 le centre d’inertie de l’hémisphère et G2 celui du cône. Déterminer algébriquement OG. Ce solide oscille autour de l’axe de rotation Oz. Calculer son moment d’inertie autour de cet axe. Donner les résultats en fonction de R, h, mhet mc.
Exemple 5 : Centre d’inertie et moment d’inertie d’un solide (suite) Solution : a- Centre de gravité et moment d’inertie de l’hémisphère : • masse de l’hémisphère : • La position ZG1du centre de gravité G1 est donnée par : • Moment d’inertie par rapport à l’axe oz :
Centre de gravité et moment d’inertie par rapport à oz du cône
Pour le solide complet • Sa masse • La position du centre d’inertie • le moment d’inertie par rapport à oz :
L’exemple des pendules Pendule simple Pendule composé Pendule de torsion
Exemple 6 : Dimensions de différents pendules Quelle sont les dimensions d’un pendule, d’un anneau, d’un disque plein et d’une tige mince fixés à leur extrémité sur la période d’oscillation est la même pour tous et égale à 1 seconde : • Pour le pendule : • Tige mince • Anneau • Disque plein
Energie cinétique • Pour un solide de masse M et de moment d’Inertie I : • Mouvement de translation : • vG= vitesse du centre de gravité • Mouvement de rotation : • = vitesse angulaire • Mouvement mixte :
Energie potentielle et condition d’existence d’oscillations libres • Conditions d’équilibre : • Si les forces dérivent d’un potentiel U : • Equilibre stable : • Equilibre instable : • Pour qu’un système effectue des oscillations libres autour d’une position, il faut que celle-ci soit une position d’équilibre stable.
Exemple 7 : condition d’oscillation, le métronome Deux masses m1 et m2 sont portées aux extrémités d’une tige de longueur ℓ1+ℓ2, articulée au point O situé à la longueur ℓ de m1. Cette tige occupe au repos une position verticale. 1- donnez la position du centre de gravité 2- écrire l’énergie potentielle et cinétique des deux masses. 3- en déduire la condition d’équilibre stable du système.
Conclusion de la deuxième leçon Dans cette deuxième leçon intitulée « composante Elémentaires des systèmes vibratoires », nous avons vu comment des systèmes très complexes peuvent être représentés par des systèmes en donnant des résultats vérifiés par l’expérience. Parmi les systèmes évoqués, on se rappelle : • Du corps humain qui pour certaines études peut être assimilé à un ensemble masse-ressort, • Une moto avec un conducteur sur une route gondolée • L’assimilation à un système masse-ressort d’une poutre et d’une tige soumise à une charge axiale ce qui nous ouvre le champs à de très nombreuses applications industrielles entre centre que nous pouvons représenter par des systèmes masse-ressort. • La modélisation de construction de type château d’eau ou de buildings à étage. • La modélisation de machines industrielles telles que les systèmes arbre à came et suite des moteurs, des installations de pompage de pétrole ou des grues • L’assimilation en biomécanique de la course et de la natation de nos bras et de nos jambes à des pendules pesants. • Et bien d’autres systèmes encore.
Conclusion de la deuxième leçon (suite) Parmi les composante élémentaires des systèmes vibratoires, il y’a les ressorts, les masses et les amortisseurs. Nous avons vu dans cette leçon comment combiner des ressorts en série et en parallèle que ça soit des ressorts simples, ou des ressorts de torsion. Nous avons vu à travers un exercice comment modéliser une grue et la rendre équivalente à un système masse-ressort. Nous avons aussi vu que les masses pouvaient être combinées en translation ou en rotation. En écrivant cette fois l’égalité entre l’énergie cinétique équivalente, on peut placer la masse équivalente à un point et simplifier l’analyse du problème. Les amortisseurs dans les calculs se comportent comme les ressorts. L’amortissement le plus utilisé est l’amortissement visqueux où la force d’amortissement est proportionnelle la vitesse du corps vibrant. Nous avons vu que les amortisseurs comme les ressorts peuvent être combinés en série ou en parallèle.
Conclusion de la deuxième leçon (suite) Nous avons finalement revu dans ce cours les notions de mécanique classique utilisées dans les mouvements vibratoires telles que comment calculer la masse totale d’un système, trouver son centre de gravité, son moment d’inertie. Nous avons appris à calculer le moment d’inertie de quelques corps simples par rapports à des axes parallèles à l’axe passant par le centre d’inertie. Nous avons fait une revue rapide des pendules sous toutes leurs formes : pendule simple, pendule pesant et pendule de torsion et à travers leur équation du mouvement leurs périodes a été calculée. Cette leçon s’est terminée par des calculs des énergies cinétiques et potentielles et les conditions nécessaires pour qu’il y ait des oscillations libres. Je vous donne rendez vous à la troisième leçon. A très bientôt.