Rotational Dynamics Angular Momentum. Collisions.
Rotational Dynamics Angular Momentum. Collisions. Rotational Dynamics Basic Concepts Rotation Angular speed Torque Angular Acceleration Nature of Angular Momentum (& Energy), origins Angular Momentum Conservation Angular Momentum for a system of bodies Parallel Axis Theorem.

Rotational Dynamics Angular Momentum. Collisions.
E N D
Presentation Transcript
Rotational Dynamics Angular Momentum. Collisions. • Rotational Dynamics • Basic Concepts • Rotation • Angular speed • Torque • Angular Acceleration • Nature of Angular Momentum (& Energy), origins • Angular Momentum Conservation • Angular Momentum for a system of bodies • Parallel Axis Theorem
Lecture 8 • Aim of the lecture • Concepts in Rotational Dynamics • Angular speed, torque, acceleration • Dependence on mass • Dependence on radius of mass, • Moment of Inertia • Dependence on rotation speed • Newton’s Second Law • Conservation of angular momentum • Main learning outcomes • familiarity with • w, t, dw/dt, I, L, including vector forms • Use of energy and angular momentum conservation • Calculation of moment of inertia
Basic Concepts – Angular Position y • Rotational Dynamics • Systems rotating about fixed axis • Use r and q to describe position • Natural quantities for rotation • For Rigid Body Rotation • r is fixed • m moves in a circle m r The position of the mass is (r,q) or (x,y) they both give same information q x Centre of rotation (axis pointing out of page)
Basic Concepts – Angular Rotation y • Rotation – ‘massless’ rod with mass • Mass moving with speed v • r is fixed • q changes with time • This is Rigid Body Rotation • m moves in a circle • angular speed is called w (see next slide) v m r The position of the mass (r,q) depends on time (r,q) = (r,wt) q x Centre of rotation (axis pointing out of page)
Basic Concepts – Angular Speed • The mass is rotation round • say f revolutions per second • f is the frequency of rotation • f is measured in Hertz, Hz • the time for one revolution is 1/f • q depends on f and time • There are 2p radians in a circle, so • the number of radians per second is • 2p f = w the angular speed • w is measured in radians per second • w = (change in angle)/(time taken) y v m r q (r,q) depends on time (r,q) = (r,wt) x Centre of rotation (axis pointing out of page)
For a 98 TVR ceberacar the maximum Engine rpm is 6250 (same for all colours) 6250rpm = 6250/60 revs per second = 104 Hz = f = 104 x 2p = 655 rads/sec = w
For dancer, the maximumrpm is much lower, about 60 rpm 60rpm = 1 Hz = f = 2p rads/sec= w
Rotation is extremely common, it is measured in • rpm, • Hertz (frequency of rotation) or • radians per second (angular speed)
Then here Look here Its not really rotating, so its angular speed is w = 0
Basic Concepts – Angular Speed • The mass is moving • at speed v • at radius r • with angular speed w y v m In time Dt, m moves vDt Which changes the angle (in radians) by vDt/r So w = angle/time = vDt/rDt = v/r r w = v/r q (r,q) depends on time (r,q) = (r,wt) x Centre of rotation (axis pointing out of page)
w = v/r In fact whilst w is the angular speed, thereis also a vector form, called the Angular velocity. As above. Its direction is along the axis of rotation, such that the object is rotating clockwiselooking along the vector w
Basic Concepts - Torque • To make an object rotate about an axis • Must apply a torque, • A force perpendicular to the radius A torque in rotation is like a force in linear motion dA A torque is a perpendicular force times a radius tA = FAdA tB = FBdB dB
Only the perpendicularcomponent mattersso here the torque is t = rFcos(q) Centre of rotation
A high torque is needed for car wheel bolts This is achieved witha long lever A short lever would notwork, wheel would fall off UNLESS the force was much bigger Torque is a ‘twisting force’ Distance matters: • The same torque can be achieved with • a long lever and small force • a short lever and a large force
Basic Concepts – Angular Acceleration Linear: F = mdv/dt = ma Rotation: t = Idw/dt = Iw = I • You can accelerate, ‘spin up’ a rotating object • by applying a torque, t • the rate of angular acceleration = t/I where I is the moment of inertia (see later) • Moment of inertia is like mass in the linear case
Torque is actually a vector • Direction is perpendicular to: • Force being applied • It is parallel to: • The axis of rotation Torque is pointing INTOthe page [the direction ascrew would be driven] F
t = I dw/dt = I This is the vector form for the relationship between torque and angular acceleration ( In advanced work, I is a tensor, butin this course we will just use a constant )
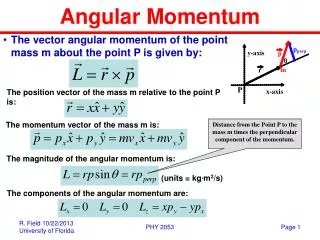
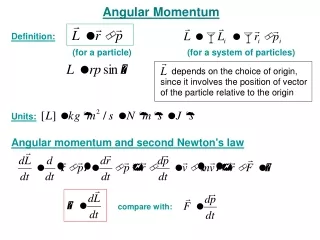
Angular Momentum • Conserved Quantities • If there is a symmetry in nature, then • There will be a conserved quantity associated with it. • (the maths to prove this is beyond the scope of the course) • Examples: • Physics today is the same as physics tomorrow, • TIME symmetry • The conserved quantity is Energy • Physics on this side of the room is the same as on the other side • Linear Translational symmetry • The conserved quantity is called Momentum • Physics facing west is the same as physics facing east • Rotational symmetry • The conserved quantity is called Angular Momentum • What is angular momentum? • For a mass m rotating at speed v, and radius r the angular momentum, L is L = mrv (= Iw) Centre of rotation r v
Angular Momentum • This is (in fact) a familiar quantity: • A spinning wheel is hard to alter direction • A gyroscope is based on conservation of angular momentum • The orbits of planets are proscribed by conservation of a.m. • It is claimed that gyroscopic effects help balance a bicycle
Angular Momentum L = mrv Centre of rotation r v • The angular momentum will depend on • the mass; the speed; • AND the radius of rotation • The radius of rotation complicates things • extended masses (not just particles) have more than one radius • each part of such a mass will have a different value for mr • and a different speed • The train rotates around theturntable axis. • The cab is close to the axis, • r is small, v is small • contributes little to L. • The chimney is far from axis • high r, higher v • will contribute more.
To simplify things we use the angular rotation speed, w • Where w = radians per second or 2p (rotations per second) • w = 2p (v/2pr) • = v/r in radians per second [see earlier slides] • So we can write v = wr • and L = (mr2)w • The quantity in brackets (mr2) is called the moment of inertia • It is given the symbol I. • I = mr2 for a single mass • [ I = r2dm for an extended body ] ∫ v
Angular Momentum L = mrv = (mr2)w Centre of rotation r v • The moment of inertia, (mr2) is • given the symbol I • can be calculated for any rigid (solid) body • depends on where the body is rotating around • The usual formula for angular momentum is L = Iw • In rotational dynamics there is a mapping from linear mechanics • replace m by I • replace v by w • replace P by L • then many of the laws of linear mechanics can be used • For example: • momentum P = mv so L = Iw • kinetic energy, E = mv2/2 so E = Iw2/2
Moments of Inertia • Some examples of moment of inertia are: • A disk rotating around its centre I = mr2/2 (if it rotates about the y axis it is I = mr2/4) • A sphere rotating around any axis through the centre, I = 2mr2/5 • A uniform road of length L rotating around its centre I = mL2/12 • A simple point mass around an axis is the same as a hollow cylinderI = mr2
Vector Form L • Angular Momentum is a vector • The magnitude of the vector is L = Iw • The direction is along the rotation axis looking in the direction of clockwise rotation • L = Iw • Note that this vector does NOT define a position in space • Clearly w is also a vector quantity with a similar definition
For several objects considered together ‘a system’ • The total angular momentum is the sum of the individual momenta • L = Sli • Where: • li is the angular momentum of the ith object • S means ‘sum of’ • L is the total angular momentum
But NOT this one Parallel Axis theorm L • Angular Momentum is a vector • The angular momentum vector does NOT define a position in space • The parallel axis theorem says that any rotating body has the same angular momentum around any axis. [NOT changing the rotation axis!] This spinning shell has the same A.M. about all the blue axes shown (without moving the shell, position does not matter)
Conservation • The total angular momentum is conserved • Entirely analogous to linear momentum • Spins in opposite directions have opposite signs As the circling air drops lower, r decreases so w goes up – a tornado As pirouetting skaterpulls in arms, w increases