Ground Control
Jordan Hodge Jordan Lyford Wilson Schreiber. Ground Control. Contents. Background Problem Statement Solution Software. Background. VTC developing CubeSat , transmits data Continuing where previous groups have left off Have to follow CubeSat to receive data


Ground Control
E N D
Presentation Transcript
Jordan Hodge Jordan Lyford Wilson Schreiber Ground Control
Contents • Background • Problem Statement • Solution • Software
Background • VTC developing CubeSat, transmits data • Continuing where previous groups have left off • Have to follow CubeSat to receive data • Existing 3-meter parabolic dish antenna • Low orbit satellite revolves around earth in minutes, seen for short time per orbit • Existing solutions • EGIS Bi-axial antenna positioning system
EGIS Rotor and Control • Equipment-GesellschaftfürInternationaleElektronikSysteme • Cost: • Software $400 • Data Interface $1,100 • Hardware $2,700 (EL-40°, AZ-180°) • Extension $2,200 (EL-90°, AZ-360°) • Rotor Hardware Mount $400 • Satellite Dish Mount $400 • Total $7,200
SatPC32 • A free software available online for tracking satellites. Updates on screen and controls rotor to point to position satellite • Uses orbit of satellite and observer position • Many types of rotors to select for output • Uses Serial port or Parallel port on PC
SatPC32 WinListen predicts path Screen Shot of SatPC32 in use
Problem • Track a low orbit satellite such as a CubeSat from horizon to horizon is as little as 30 seconds 180°/30 seconds=6°/sec • Move a 3 meter satellite dish • 360° Azimuth (left/right) • 90° Elevation (up/down) • Interface to PC running SatPC32
Solution • Gears and motors, motor controllers • FreescaleColdfire 32-bit Microcontroller • Serial interface with SatPC32 using EGIS controls and a serial port • Magnetic Encoders measure position of dish • Use/Modify existing designs for elevation and azimuth control
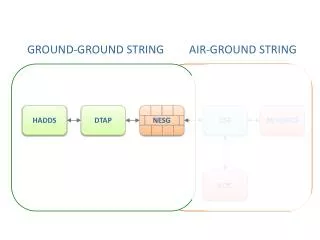
System Diagram SatPC32 EL - Motor Controller RS232 AZ - Motor Controller Micro- controller Position Encoders Limit Switches
Mechanical Concepts • Azimuth • A left to right angle measurement from a fixed point (north in navigation) • Worm Gears • Speed (Gear Ratio) • Torque • Modify existing designs
Power Distribution A Micro- controller Position Encoders PC Running SatPC32 E 5Vdc regulator 12Vdc 10Amp Limit Switch Motor Controller Circuit Protection FUSE AC 12Vdc 10Amp FUSE Limit Switch Motor Controller
Programming • Read new position from serial port • Stores values when they come in • Read actual position from encoders • Measure periodically • Decide where to turn, how fast • Always checking limit switches • If ever activated, stop motors New Serial? Read Serial Check Encoders? Read Encoders Controller (Set Outputs)