Understanding Graphics Transformations: Scaling, Rotation, and Projections in 3D
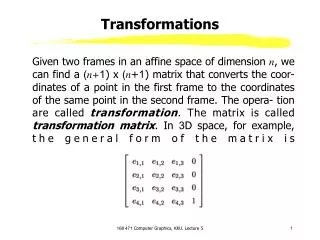
Explore the foundational concepts of graphics transformations as introduced in CS 445. This lecture covers critical topics including coordinate systems, scaling (uniform and non-uniform), and the mathematics of 2D and 3D rotations. Gain insight into the practical applications of transformations, such as composing multiple rotations and using homogeneous coordinates. Learn how to translate points within their coordinate systems and understand the derivation of rotation matrices for arbitrary axes, essential for 3D graphics programming and rendering.

Understanding Graphics Transformations: Scaling, Rotation, and Projections in 3D
E N D
Presentation Transcript
Transformations Aaron Bloomfield CS 445: Introduction to Graphics Fall 2006 (Slide set originally by David Luebke)
Graphics coordinate systems • X is red • Y is green • Z is blue
If you are on the +z axis, and +y is up, then +x is to the right Math fields have +x going to the left Graphics coordinate systems
Outline • Scaling • Rotations • Composing Rotations • Homogeneous Coordinates • Translations • Projections
2 Scaling • Scaling a coordinate means multiplying each of its components by a scalar • Uniform scaling means this scalar is the same for all components:
X 2,Y 0.5 Scaling • Non-uniform scaling: different scalars per component: • How can we represent this in matrix form?
Scaling • Scaling operation: • Or, in matrix form: scaling matrix
Outline • Scaling • Rotations • Composing Rotations • Homogeneous Coordinates • Translations • Projections
(x’, y’) (x, y) 2-D Rotation x’ = x cos() - y sin() y’ = x sin() + y cos()
2-D Rotation • This is easy to capture in matrix form: • 3-D is more complicated • Need to specify an axis of rotation • Simple cases: rotation about X, Y, Z axes
3-D Rotation • What does the 3-D rotation matrix look like for a rotation about the Z-axis? • Build it coordinate-by-coordinate • 2-D rotation from last slide:
3-D Rotation • What does the 3-D rotation matrix look like for a rotation about the Y-axis? • Build it coordinate-by-coordinate
3-D Rotation • What does the 3-D rotation matrix look like for a rotation about the X-axis? • Build it coordinate-by-coordinate
3-D Rotation • General rotations in 3-D require rotating about an arbitrary axis of rotation • Deriving the rotation matrix for such a rotation directly is a good exercise in linear algebra • Another approach: express general rotation as composition of canonical rotations • Rotations about X, Y, Z
Outline • Scaling • Rotations • Composing Rotations • Homogeneous Coordinates • Translations • Projections
Composing Canonical Rotations • Goal: rotate about arbitrary vector A by • Idea: we know how to rotate about X,Y,Z • So, rotate about Y by until A lies in the YZ plane • Then rotate about X by until A coincides with +Z • Then rotate about Z by • Then reverse the rotation about X (by -) • Then reverse the rotation about Y (by -) • Show video…
Composing Canonical Rotations • First: rotating about Y by until A lies in YZ • Draw it… • How exactly do we calculate ? • Project A onto XZ plane • Find angle to X: = -(90° - ) = - 90 ° • Second: rotating about X by until A lies on Z • How do we calculate ?
3-D Rotation Matrices • So an arbitrary rotation about A composites several canonical rotations together • We can express each rotation as a matrix • Compositing transforms == multiplying matrices • Thus we can express the final rotation as the product of canonical rotation matrices • Thus we can express the final rotation with a single matrix!
Compositing Matrices • So we have the following matrices: • p: The point to be rotated about A by • Ry : Rotate about Y by • Rx : Rotate about X by • Rz : Rotate about Z by • Rx -1: Undo rotation about X by • Ry-1: Undo rotation about Y by • In what order should we multiply them?
Compositing Matrices • Remember: the transformations, in order, are written from right to left • In other words, the first matrix to affect the vector goes next to the vector, the second next to the first, etc. • This is the rule with column vectors (OpenGL); row vectors would be the opposite • So in our case: p’ = Ry-1 Rx -1 Rz Rx Ry p
Rotation Matrices • Notice these two matrices: Rx : Rotate about X by Rx -1: Undo rotation about X by • How can we calculate Rx -1? • Obvious answer: calculate Rx (-) • Clever answer: exploit fact that rotation matrices are orthonormal • What is an orthonormal matrix? • What property are we talking about?
Rotation Matrices • Rotation matrix is orthogonal • Columns/rows linearly independent • Columns/rows sum to 1 • The inverse of an orthogonal matrix is just its transpose:
Rotation Matrix for Any Axis • Given glRotated (angle, x, y, z) • Let c = cos(angle) • Let s = sin(angle) • And normalize the vector so that ||(x,y,z|| == 1 • The produced matrix to rotate something by angle degrees around the axis (x,y,z) is:
Outline • Scaling • Rotations • Composing Rotations • Homogeneous Coordinates • Translations • Projections
Translations • For convenience we usually describe objects in relation to their own coordinate system • We can translate or move points to a new position by adding offsets to their coordinates: • Note that this translates all points uniformly
Translation Matrices? • We can composite scale matrices just as we did rotation matrices • But how to represent translation as a matrix? • Answer: with homogeneous coordinates
Homogeneous Coordinates • Homogeneous coordinates: represent coordinates in 3 dimensions with a 4-vector • [x, y, z, 0]T represents a point at infinity (use for vectors) • [0, 0, 0]T is not allowed • Note that typically w = 1 in object coordinates
Homogeneous Coordinates • Homogeneous coordinates seem unintuitive, but they make graphics operations much easier • Our transformation matrices are now 4x4:
Homogeneous Coordinates • Homogeneous coordinates seem unintuitive, but they make graphics operations much easier • Our transformation matrices are now 4x4:
Homogeneous Coordinates • Homogeneous coordinates seem unintuitive, but they make graphics operations much easier • Our transformation matrices are now 4x4:
Homogeneous Coordinates • Homogeneous coordinates seem unintuitive, but they make graphics operations much easier • Our transformation matrices are now 4x4: • Performing a scale:
More On Homogeneous Coords • What effect does the following matrix have? • Conceptually, the fourth coordinate w is a bit like a scale factor
More On Homogeneous Coords • Intuitively: • The w coordinate of a homogeneous point is typically 1 • Decreasing w makes the point “bigger”, meaning further from the origin • Homogeneous points with w = 0 are thus “points at infinity”, meaning infinitely far away in some direction. (What direction?) • To help illustrate this, imagine subtracting two homogeneous points
Outline • Scaling • Rotations • Composing Rotations • Homogeneous Coordinates • Translations • Projections
Homogeneous Coordinates • How can we represent translation as a 4x4 matrix? • A: Using the rightmost column: • Performing a translation:
Translation Matrices • Now that we can represent translation as a matrix, we can composite it with other transformations • Ex: rotate 90° about X, then 10 units down Z:
Translation Matrices • Now that we can represent translation as a matrix, we can composite it with other transformations • Ex: rotate 90° about X, then 10 units down Z:
Translation Matrices • Now that we can represent translation as a matrix, we can composite it with other transformations • Ex: rotate 90° about X, then 10 units down Z:
Translation Matrices • Now that we can represent translation as a matrix, we can composite it with other transformations • Ex: rotate 90° about X, then 10 units down Z:
Transformation Commutativity • Is matrix multiplication, in general, commutative? Does AB = BA? • What about rotation, scaling, and translation matrices? • Does RxRy = RyRx? • Does RAS = SRA ? • Does RAT = TRA ?
Outline • Scaling • Rotations • Composing Rotations • Homogeneous Coordinates • Translations • Projections
Perspective Projection • In the real world, objects exhibit perspective foreshortening: distant objects appear smaller • The basic situation:
How tall shouldthis bunny be? Perspective Projection • When we do 3-D graphics, we think of the screen as a 2-D window onto the 3-D world • The view plane
Viewplane X P (x, y, z) x’ = ? (0,0,0) Z d Perspective Projection • The geometry of the situation is that of similar triangles. View from above: • What is x?
Perspective Projection • Desired result for a point [x, y, z, 1]T projected onto the view plane: • What could a matrix look like to do this?
A Perspective Projection Matrix • Answer:
A Perspective Projection Matrix • Example: • Or, in 3-D coordinates:
A Perspective Projection Matrix • OpenGL’s gluPerspective() command generates a slightly more complicated matrix: • Can you figure out what this matrix does?