Download

1 / 35
390 likes | 754 Vues
Teoría general de Control de movimiento en máquinas industriales. USUARIO. PROGRAMADOR. SISTEMA DE CONTROL DE MOVIMIENTO. EJES (CARGA). SUPERVISIÓN. OTROS SISTEMAS. Motilón control es una tecnología que permite controlar el movimiento de uno o varios ejes.

E N D
Teoría general de Control de movimiento en máquinas industriales
USUARIO PROGRAMADOR SISTEMA DE CONTROL DE MOVIMIENTO EJES (CARGA) SUPERVISIÓN OTROS SISTEMAS Motilón control es una tecnología que permite controlar el movimiento de uno o varios ejes ¿Que es Motion Control? MECANICA ELECTRONICA MECA TRON INFORMATICA ICA
PWM Redes Primer sistema motion control neumático CHIP PID Estandarización PID Historia 2000 1800 1850 1900 1950
MáquinasHerramienta Máquinas de Producción Grúas Sistema físico Manejo Funciones Típicas Áreas de aplicación en la industria • Grandes variaciones de carga • Aceleraciones bajas • Sistemas Conservativos • Sistemas Disipativos • Amplio rango velocidad • Secuencia programable (Lenguaje) • Manejo eje a eje • Gruas Robotizadas • Parametrizables según producto • Antipenduleo • Antichoque • Reemplazo de componentes mecánicos • Trayectorias n_dimensionales • Manejo de herramientas
SISTEMA DE CONTROL DE MOVIMIENTO MOTOR MOTOR MOTOR EJE EJE EJE EJE EJE EJE CONCEPTO DE MAQUINA GEARLESS ¿Cuándo se utiliza? MOTOR
¿por qué usar esta tecnología? Ventajas: • Flexibilidad • Fácil cambio de producto • Concepto de máquina modular • Performance • Mayor Velocidad • Mayor precisión • Menor mantenimiento • Ahorro de energía • En algunos casos implica menor costo
Debobinado Proceso Salida CONVERTING Máquina Modular
SISTEMA DE CONTROL DE MOVIMIENTO CONVERTING Máquina Modular Flexibilidad para realizar cambios y reemplazos
Ventajas: • Flexibilidad • Fácil cambio de producto • Concepto de máquina modular • Performance • Mayor Velocidad • Mayor precisión • Menor mantenimiento • Ahorro de energía • En algunos casos implica menor costo ¿por qué usar esta tecnología? Desventajas: • Tecnología nueva (capacitación) • Propiedades de los componentes mecánicos • En algunos casos implica mayor costo
Vector Control Diagrama en Bloques
Ejemplos de aplicación y Funciones (Vídeo) Movimientos punto a punto: Llenadora Almacén inteligente Corrección al vuelo: Indexado 1 Indexado 2 Seguimiento de trayectorias: Pick and place Robot Sincronismos: Traversing Cortadora transversal
Conformado de la posición Mecánica (reductores) Tipos de ejes: Con módulo Lineales Sin módulo Captador Gen.Tray. Sensor de referencia Conformador Rotativos
Rectangular: Posición Velocidad Aceleración Pulso Triangular: Baja aceleración Posición Velocidad Aceleración Pulso Trapezoidal: Baja velocidad Posición Velocidad Aceleración Pulso Generador de trayectoria Movimientos punto a punto:
Generador de trayectoria Movimientos punto a punto: Trapezoidal redondeada: Pulso finito Velocidad Posición
k M Generador de trayectoria ¿Por que limitar el pulso? • Como veremos en el siguiente ejemplo en general los movimientos con pulso limitado reducen las vibraciones en el sistema
k M Generador de trayectoria ¿Por que limitar el pulso?
Generador de trayectoria ¿Por que limitar el pulso? k=1000 Sin Jerk Limitado Con Jerk Limitado Zoom Zoom Posición masa Posición masa
Lazos de Control Lazo de Torque / Fuerza: Control de Torque / Fuerza Carga Motor Debido a que la dinámica de este lazo no depende de la carga sueles venir ajustado desde el fabricante del drive del actuador en cuestión o se auto ajusta con los datos del actuador
- Fácil de controlar Motor de corriente continua ROTATIVOS - Gran mantenimiento - Económicos Motor paso a paso - Lazo abierto - Amplio rango de velocidad Motor asincrónico jaula de ardilla - Menor dinámica - Máxima Dinámica Motor sincrónico de imán permanente - Costo Motor con núcleo de hierro - Grandes Fuerza LINEALES - Fuerza atractiva y cogg. - Poca fuerza atractiva Motor canal U - Costo y poca fuerza - Poca fuerza atractiva Motor Tubular - Poco recorrido Motor Slotless - Punto medio
Lazos de Control Lazo de Torque / Fuerza: Motor Continua
Motor sincrónico Motor asincrónico Servo Control Vector Control (más cálculos) Lazos de Control Lazo de Torque / Fuerza:
Lazos de Control Lazo de Velocidad: En este caso la carga entra dentro del lazo de control Control de Torque / Fuerza PI Carga Filtros Control de velocidad
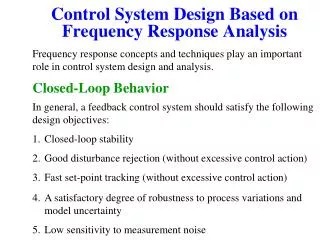
Descripción de la respuesta dinámica En tiempo En frecuencia Equación diferencial Descripción por la respuesta en fercuencia Respeuesta al escalon Diagrama de bode Función transferencia Lazos de Control Lazo de Velocidad: Prcedimientos de ajuste de lazo Tener en cuenta las posibles alinealidades: - Rozamiento seco - Juego
x Overshoot max. 20 - 40% Vm d t TOn TOff Lazos de Control Lazo de Velocidad: Ajuste en tiempo Explanation of transition function: • X(t) Step response • TOn Rise time • TOff Recovery time • Vm Overshoot width • d Tolerance band Output (actual value) to slow Increase KP and repeat measurement 1 Set integrator time TN to large value, e.g. 1000 ms 2 Create setpoint step change 3 Manipulated value must not reach the limit Output (actual value) t Output (actual value) 1) KP is optimum 2) Decrease TN now(TN rise time) allow approx. 20-40% overshoot Kp Tn Overshoot approx. 20-40% t Output (actual value) t TOn to dynamic Decrease KP and repeat measurement Example: speed controller t
Lazos de Control Modelo de referencia para la acción integral Sin modelo Ajuste del modelo Con modelo
Lazos de Control Lazo de posición: Control de Posición P Carga Filtros
Lazos de Control Lazo de posición: Ajuste del lazo en tiempo
Lazos de Control Lazo de posición: Precontrol de Velocidad y Torque Generador de trayectoria Carga Red, Procesamiento
Lazos de Control Lazo de posición: Filtro de Balanceo Sin filtro Generador de trayectoria Con filtro Carga
Sincronismo Se dice que existe sincronismo entre dos o más ejes cuando la posición de estos está relacionada Sincronismo tipo engranaje Sincronismo tipo leva Sincronismo tipo trayectoria
Creo un maestro virtual que es el parámetro de la curva (q) Sincronismo maestro-esclavo En el sincronismo maestro esclavo se establece: Cualquiera puede ser maestro y esclavo Eje eje 2 debe ser maestro y el eje 1 escalvo
Sincronismo Tipo de acople: Setpoint o Valor actual Eje maestro Gen. Gen. Carga Carga Eje esclavo