Edge Linking & Boundary Detection
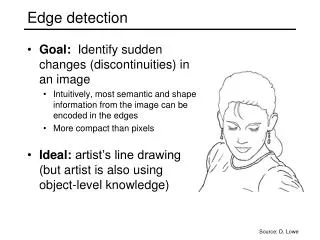
Edge Linking & Boundary Detection. Ideal case : Techniques detecting intensity discontinuities should yield pixels lying only on edges ( or the boundary between regions). Real life :

Edge Linking & Boundary Detection
E N D
Presentation Transcript
Edge Linking & Boundary Detection • Ideal case: • Techniques detecting intensity discontinuities should yield pixels lying only on edges ( or the boundary between regions). • Real life: • The detected set of pixels very rarely describes a complete edge due to effects from: noise, breaks in the edge due to non-uniform illumination.
Edge Linking & Boundary Detection • Solution: • Edge-detection techniques are followed by linking and other boundary detection procedures which assemble edge pixels into meaningful boundaries.
Local Processing • Analyze the pixel characteristics in a small neighborhood (3x3, 5x5) about every (x,y) in an image. • Link similar points to form a edge/boundary of pixels sharing common properties.
Local Processing • Criteria used/Properties: • The strength of the response of the gradient operator that produced the edge pixel. • The direction of the gradient vector.
1. or Local Processing • In other words: (x’,y’) and (x,y) are similar if: where T is a nonnegative threshold.
Local Processing • In other words (cont.): 2. (x’,y’) and (x,y) are similar if: where A is an angle threshold.
Global Processing via the Hough Transform • Points are linked by determining whether they lie on a curve of specified shape. • Problem: • Find subsets of n points that lie on straight lines.
Global Processing via the Hough Transform • Solution: • Find all lines determined by every pair of points • Find all subsets of points close to particular lines • Involves: n(n-1)/2 ~ n2 lines n(n(n-1))/2 ~ n3 computations for comparing every point to all lines.
Global Processing via the Hough Transform • Better solution: Hough Transform • Equation of line passing through point (xi,yi): yi = axi + b (a,b varies) • But: b = -xia + yi equation of single line on ab plane
Global Processing via the Hough Transform • A line in the (x,y) plane passes through several points of interest and has a set of specific (a,b) values. • A line in parameter space [(a,b) plane] denotes all lines that pass through a certain point (xi,yi) and has an infinite number of (a,b) values.
Global Processing via the Hough Transform • A specific line is represented by a point in the (a,b) plane. • Two lines in parameter space that meet at a certain point show points belonging to the same line (in x,y plane).
Global Processing via the Hough Transform • Since a,b approach infinity as a line approaches the vertical, we can use the normal representation of a line:
Global Processing via the Hough Transform • Hough transform is applicable to any function of the form g(v,c) = 0. • v: vector of coordinates, c: coefficients. • e.g. points lying on a circle:
Global Processing viaGraph-Theoretic Techniques • A global approach based on representing edge segments in the form of a graph and searching the graph for low-cost paths that correspond to significant edges.
Global Processing viaGraph-Theoretic Techniques • Advantage: • performs well in the presence of noise • Disadvantage: • complicated and requires more processing time.
Global Processing viaGraph-Theoretic Techniques • Graph G = (N,U): • A finite, nonempty set of nodes N together with a set U of unordered pairs of distinct elements of N. • (ni,nj) of U: arc
Global Processing viaGraph-Theoretic Techniques • Directed graph: • a graph in which arcs are directed • If ni to nj is directed, nj is a successor of its parent node ni.
Global Processing viaGraph-Theoretic Techniques • Expansion of node: • To identify the successors of a node • Level 0 consists of a single node (start node) • Last level contains the goal nodes.
Global Processing viaGraph-Theoretic Techniques • A sequence of nodes n1,n2,…,nk (with each ni being a successor of ni-1) is called a path from n1 to nk and its cost is:
Global Processing viaGraph-Theoretic Techniques • Edge element: • The boundary between two pixels p & q such that p and q are 4-neighbors. • Edge: • A sequence of connected edge elements.
Global Processing viaGraph-Theoretic Techniques H: the highest intensity value in the image
Global Processing viaGraph-Theoretic Techniques (0) (1) (2)
Global Processing viaGraph-Theoretic Techniques • Minimum cost path: