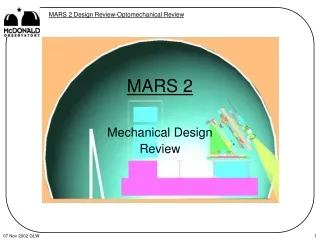
MARS 2 Mechanical Design Review Drive Axes
Overview of orientation, location, and travel range of drive axes including drive configuration, loads, encoders, bearings, mounts, and adjustments. Details on camera focus, drives, and resolutions. Discussion on load factors, mounting methods, optical adjustments, and current design status.

MARS 2 Mechanical Design Review Drive Axes
E N D
Presentation Transcript
MARS 2 Mechanical Design Review
Drive axes Orientation, location, & travel range of axes Typical axis drive configuration Axis loads, drives, encoders, & bearings Optical mounts Manual adjustments Beam splitter Collimator Lenslet/camera Knife edge CCAS mounting Current design status Topics
MARS 2 Remote AxesTop to bottom • Wavescope camera • SenSys camera focus • Focus (Z) • X • Yaw (rotation about an axis parallel to Y) • Pitch (rotation about an axis parallel to X) • Y’ (combined with Focus to get Y)
MARS 2 Axes from Model Camera Focus Yaw Pitch Y’ SenSys X
Common Axis DriveComponents • For all BUT the SenSys axis • Stepper motor • Ball screw with preloaded drive nut • Limit and home switches • Encoder (absolute, rotary) • Fail-safe brake (not on camera axis) • SenSys camera axis • TS Products motor with internal encoder
Axis Drive Resolution • Stepper motor • 200 full steps per revolution • 10 msteps per full step • 2,000 msteps per revolution • Lead Screw • 2-mm per revolution lead screw • With mstepping results in 1 mm per mstep resolution • will need ~1/2 mm per mstep for yaw and pitch resolution • Absolute encoder • Parallel interface • Minimum encoder resolution of 2,000 counts per revolution will count each mstep
Axis Drive Loads • Worst case is “uphill” motion • Loads consist of: • Inertia load • Gravity component along axis • Friction • Encoder • Bearings • Drive screw • Others
Linear Axis Mounting • THK preloaded rails & bearings • Multiple rails with one block per rail • Slides mounted perpendicular to travel on one side will prevent binding due to misalignment & thermally induced dimensional changes • similar to bearing arrangement on the tracker carriage
dF & dL Stage Lead screw Yaw/Pitch Axis Mounting • Yaw axis • THK radial cross roller bearing for the pivot • THK curved bearing rail for additional support • similar to rho bearing on the carriage • Pitch axis will use flex pivots for the pivot • Yaw and Pitch axes will use flex pivots and small slides to accommodate dF (±2°) & dL (~0.3 mm) at the drive nut
Optical Mounts • Manual adjustments made with opposed adjusting screws where possible • Locks stage in position, does not rely on springs to hold stage against adjustment screw • Combination of flex pivots, pins, adjusting and clamping screws for yaw/pitch adjustments • X-Y-Z and X-Z cross roller stages for translation
Manual AdjustmentsPart 1 • Lenslet • x, y, yaw, pitch: aligns lenslet to optical axis • Lenslet/camera stage • focus: positions lenslet/camera wrt collimator • Collimator • x, y, yaw, pitch: aligns collimator to optical axis • focus: positions collimator wrt beam splitter cube • Beam splitter cube • x, y, focus, yaw, pitch: aligns cube to laser beam
Manual AdjustmentsPart 2 • Reference mirror • x, y, yaw, pitch: aligns mirror to optical axis • focus: positions mirror wrt HET focus • SenSys camera • x, y: positions camera wrt optical axis • Light source • x, y, focus: positions fiber wrt pin hole • Knife edge • focus: positions knife edge wrt beam splitter cube
Collimator Lenslet Reference Mirror Beam splitter Cube Knife Edge Isometric View of MARS2
Mounting in CCAS Tower • Remove everything down to 12-inch I-beams • Install stiffeners to forward cross beams • Install a layer of dampening material (plywood) • Install base plate • Incorporates gross translation & tip/tilt adjustments • Install base wedge with y’-axis • Install pitch, yaw, & x-axis assembly • Install assembled optical bench with focus axis • Install electronics rack
CCAS Components Electronics rack Base plate Dampening material 12-inch I-beam members Frame stiffener
Current Design Status • Most purchased components are identified • Final layout work & mounting details need to be completed • Drive configuration needs to be finalized • Laser for component alignment needs to be added • Drawing generation is the next big task
Unknowns • Tolerance analysis • Metal finishing-is it needed?
Top View of MARS2 SenSys Camera Light Source Knife Edge Lenslet Camera Pellicle Collimator Reference Mirror Beam splitter Cube
Camera Focus Y Yaw X Pitch SenSys Y’ Relative Axis LocationsSide View
SF = ma Fdrive-Ffr-W*cos(a) = m*a and with m = W/gc Fdrive-Ffr-W*cos(a) = W*a/gc Fdrive = Ffr + W*[cos(a) + a/gc] + Fdrive a Ffr W cos(a) W rearranging Axis Drive Loadsin pictures and equations Note that: • a = 35° >> cos(35°) = 0.82 • gc = 386.4 in/sec2 >> for small a’s, cos(a) dominates • used a = 10 in/sec2 in calculations • Not all axes have a W cos(a) component
Motor produces torque Drive nut converts torque to force Force * Lead Torque = 2 * p * e Torque to Load Drive coupling Ball screw with xx lead (pitch) e = efficiency of ball screw, ~ 0.85-0.90
Axis Drive Specifics • IMS stepper motor • two sizes to cover six axes • dual shaft • Schneeberger ball screw • 12-mm diameter for all but camera axis • 3,400 N (770 lbf) static load s. f. min = 4.2 • 2,500 N (565 lbf) dynamic load (L10) s. f. min= 3.1 • preloaded drive nut • special order for length and end configuration • Absolute rotary encoder • parallel output • multi turn (25 turns needed) • 4,096 steps per revolution • 2 encoder steps/1 mm • 1 encoder step /0.5 mm • Electroid fail-safe brake • engages with power off