Geometrical Transformations 2
Dive into the world of 2D-to-3D transformations, inverse matrices, coordinate frame shifts, and the importance of matrix stacks. Understand how different rotations and translations impact graphic representations and frame shifts. Discover the power of transforming reference frames efficiently.

Geometrical Transformations 2
E N D
Presentation Transcript
Geometrical Transformations 2 Adapted from Fundamentals of Interactive Computer Graphics, Foley and van Dam, pp. 245-315, by Geb Thomas
Learning Objectives • Learn how 2D transformations are represented in 3D. • Recognize the inverse matrix for a homogeneous transformation. • Understand how the transformations also represent coordinate frame transformations. • Understand the concept of a matrix stack.
3D Rotation – Z Axis About the Z axis z y x
3D Rotation – X Axis About the Z axis z y x
3D Rotation – Y Axis About the Z axis z y x
Inverse Matrices • The 3x3 rotation submatrix is orthogonal. • The inverse of the 3x3 matrix is the transform of the original matrix • The inverse of the translation component is just the reverse translation.
Composition of Transforms • Various motions can be tacked, one after the other, in a long sequence of matrices: T1T2T3…T4 • These combinations will maintain the relative shape of the vectors processed, but will shift them around the original coordinate frame.
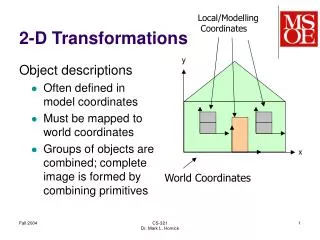
Thinking of Reference Frames • Another way to think of this mathematics, is to imagine transforming the coordinate frame to a new place Transformation, T, moves things 5 to the right and 2 up. The whole coordinate frame moves to a new position z1 y1 z0 y0 T(5,0,2) x1 x0
Coordinate Rotation y0 y1 R(y=-35) z0 z1 x1 x0
The Matrix Stack • While drawing a world, you often want to draw with respect to a convenient coordinate frame • The graphics card need only keep track of the current position (current transformation) • If you want to shift to the left, multiply the current frame by a left translation • When done, shift back to the right
The Matrix Stack, FILO T(3,2,5) R(x=35) R(y=15) Programmer’s Next desired Shift of reference frames Current position of Drawing reference frame T(2,1,1) R(z=12) T(15,20,35)
Learning Objectives • Learn how 2D transformations are represented in 3D. • Recognize the inverse matrix for a homogeneous transformation. • Understand how the transformations also represent coordinate frame transformations. • Understand the concept of a matrix stack.

![Geometrical Isomers of [CoCl 2 (en) 2 ] +](https://cdn2.slideserve.com/3890507/geometrical-isomers-of-cocl-2-en-2-dt.jpg)