Download
1 / 9
120 likes | 590 Vues
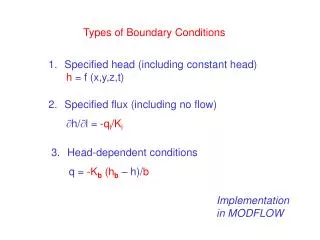
Types of Boundary Conditions. Specified head (including constant head) h = f (x,y,z,t). Specified flux (including no flow) h/l = -q l /K l. Head-dependent conditions q = -K b (h b – h)/ b. Boundary Conditions. Boundary conditions always influence a steady state

E N D
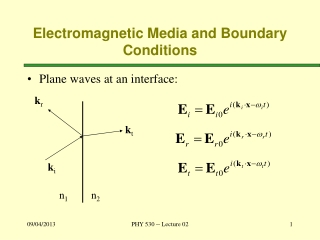
Types of Boundary Conditions • Specified head (including constant head) • h = f (x,y,z,t) • Specified flux (including no flow) • h/l = -ql/Kl • Head-dependent conditions • q = -Kb (hb – h)/b
Boundary Conditions • Boundary conditions always influence a steady state • solution but may not influence a transient solution. • A steady state solution with all specified flux boundary • conditions (including no flow) without specified head • or head-dependent internal boundaries may not converge • or will give a non-unique solution. • Initial conditions provide reference heads for transient • solutions so that it may be appropriate to set all boundary • conditions to flux conditions.
Boundary Conditions • A specified head boundary acts as an infinite source or sink. • Specified flux conditions allow calibration to • hydraulic conductivity while specified head and • no flow boundaries do not.
Targets used in Model Calibration • Head measured in an observation well is known as a target. • The simulated head at the node representing the observation well is compared with the measured head. • During model calibration, parameter values (e.g., R and T) are adjusted until the simulated head matches the observed value. • Baseflow measurements are also used as targets in • calibrating a groundwater flow model. • Model calibration solves the inverse problem.
R river: specified head BC R and K are known with uncertainty. Often R and K are estimated during model calibration. Problem: Model is sensitive only to the ratio R/K. Baseflow measurements give you a way to calibrate the model since amount coming in via recharge must equal amount exiting the model as baseflow.
Distinction between physical and hydraulic boundary conditions
Water table contour map of Long Island, N.Y. A model built with hydraulic boundary conditions will be invalid if stresses inside or outside the model domain cause the hydraulic boundaries to shift or change.
4500 m 4500 m PS 4.1 PS 4.6 Physical No flow boundaries Hydraulic Specified head boundaries
Telescopic Mesh Refinement or TMR to set boundary conditions TMR option available in GWV