Recognition of volumetric features using 2d hints
440 likes | 608 Vues
Kyle Sigo and Andrew Lowe. Recognition of volumetric features using 2d hints. Table of Contents. 1. Introduction 2. Approaches to Feature Recognition 3. Methodology 4. Feature Recognizer Prototype 5. Case Studies 6. Conclusion. Introduction.

Recognition of volumetric features using 2d hints
E N D
Presentation Transcript
Kyle Sigo and Andrew Lowe Recognition of volumetric features using 2d hints
Table of Contents • 1. Introduction • 2. Approaches to Feature Recognition • 3. Methodology • 4. Feature Recognizer Prototype • 5. Case Studies • 6. Conclusion
Introduction • Recognizing machining features (holes, slots, pockets, etc.) in solid model data is crucial to developing efficient automated process plans • Most successful attempts at feature recognition utilize hint-based procedures on 3D B-Rep models Introduction: 1 of 2
Introduction (cont.) • This paper proposes hint-based feature identification in models built using sweep operations Introduction: 2 of 2
1. Introduction • 2. Approaches to Feature Recognition • 3D B-Rep-based • 2D • 3D CSG-based • 3. Methodology • 4. Feature Recognizer Prototype • 5. Case Studies • 6. Conclusion
3D B-Rep-Based Approaches • Graph-based methods • Attributed Adjacency Graph (AAG) • Expresses relationships between faces and edges of B-rep model • Divide into sub-graphs and search for predetermined feature profile patterns • Difficulty in recognizing interacting or nested features Approaches to Feature Recognition: 1 of 6
3D B-Rep-Based Approaches (cont.) • Volumetric decomposition • Decompose convex hull and volume of part into form features • Deduce manufacturing features from these Approaches to Feature Recognition: 2 of 6
3D B-Rep-Based Approaches (cont.) • Hint-based methods • Look for traces of features (hints) in B-Rep model • Search for feature completion procedures (traces in part body) Approaches to Feature Recognition: 3 of 6
3D B-Rep-Based Approaches (cont.) • Trace for pocket is it’s floor, for hole is it’s cylindrical surface • Analyze traces for completion • Can handle interacting and nested features Approaches to Feature Recognition: 4 of 6
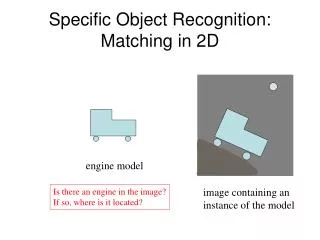
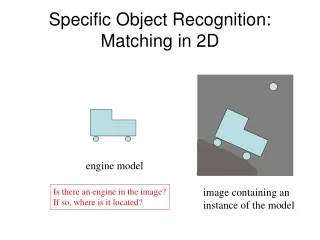
2D Approaches • Large amount of engineering design data in 2D drawings • Extract manufacturing features from orthographic views (top, front, side) • Hint-based reasoning with removal of hidden lines • Less computationally intensive than 3D Approaches to Feature Recognition: 5 of 6
3D CSG-Based Approaches • Earliest attempts at feature recognition • Search for patterns in CSG representation of part model • Difficulty handling curved surfaces, interacting features and non-unique representations Approaches to Feature Recognition: 6 of 6
Table of Contents • 1. Introduction • 2. Approaches to Feature Recognition • 3. Methodology • Hint Generation • Hint Verification • 3D Verification • Hint Validation • 4. Feature Recognizer Prototype • 5. Case Studies • 6. Conclusion
Methodology - Overview • Covers feature recognition in sweep operations • Hint Generation • Hint Verification • Hint Validation • Feature Generation Methodology: 1 of 17
Hint Generation • Hint – A pattern in geometry that indicates the presence of a particular feature that corresponds to a specific type of machining operation • Recognized as incomplete features or parameter-based patterns Methodology: 2 of 17
Hint Generation (cont.) • Three detection criteria: • Presence • Feature Sign • Nature of the Loops Methodology: 3 of 17
Locating Material Side • Which side of profile curves has material? • Create, unite, intersect • Material between outer and inner curves • Subtract • Material inside inner curve, outside outer Methodology: 4 of 17
Locating Material Side (cont.) • Hint generated by analyzing surface normals and feature sign • Crucial for identifying location of material removal Methodology: 5 of 17
Hole Hint Generation • Denoted by a concave cylindrical surface • Concavity defined by: • Intersection with sweep material • Outward Projection • Angle criterion to ignore non-machinable holes Methodology: 6 of 17
Slot Hint Generation • Slots produced by linear sweep of a cutter • Slot Indicators • Parallel faces intersecting material • Faces coincident when perpendicular to normal • Parallel lines coincident when projected Methodology: 7 of 17
Slot Hint Rules • Parallel lines with facing normals • Parallel lines forming loops with opposing normals • Parallel lines in opposite loops under subtract condition Methodology: 8 of 17
Hint Verification • Hints must be verified • Machining features completed after verification • Two phase process • 2D verification • 3D validation Methodology: 9 of 17
Hole Hint 2D Verification • Hint arc completed to full circle • Circle compared with other curves • Invalid if: • Circle intersects profile • Enclosed curves present • If invalidation condition not met, ready for 3D validation Methodology: 10 of 17
Slot Hint 2D Verification • Identify limits of slot by finding max 2D length • Hint lines trimmed to overlap • End points of trimmed lines connected • Subsequent polygon defines minimum possible area of slot Methodology: 11 of 17
Slot Hint 2D Verification (cont.) • Limits on minimum area must be determined • All curves in profile searched to identify those that: • Are enclosed by material • Overlap the slot Methodology: 12 of 17
Slot Hint 2D Verification (cont.) • Each curve clipped to hint walls • Clipped curves separated and sorted • Two groups of curved measured to slot wall, determining limit of tool path • Process creates “child hints” • Each child compared to profile curves • Valid children passed to 3D validation Methodology: 13 of 17
Pseudo-Code for Slot Algorithm Methodology: 14 of 17
3D Verification • Solid feature created from hint • Defined by hint lines and host feature • Cylinders created for hole hints • Blocks created for slot hints • Solids and parameters used to define machining features Methodology: 15 of 17
3D Verification (cont.) • Hint solids compared to host geometry • Those with clashes are rejected • Accepted if there is contact but no interference Methodology: 16 of 17
Hint Validation • ??? Methodology: 17 of 17
Table of Contents • 1. Introduction • 2. Approaches to Feature Recognition • 3. Methodology • 4. Feature Recognizer Prototype • 5. Case Studies • 6. Conclusion
Feature Recognizer Prototype • Implemented as part of Intelligent Manufacturing Planner (IMPlanner) prototype system at Ohio University • Allows system to handle models designed using hybrid techniques (design features and extruded operations) Feature Recognizer Prototype: 1 of 4
Feature Recognizer Prototype • Consists of three modules: • 1. Geometry query module • 2. Geometric Tool Kit • 3. Feature identification module (feature hint generator, feature completer, feature validator) • Modules interact with CAD system to extract and process relevant part information to generate machining feature model Feature Recognizer Prototype: 2 of 4
Feature Recognizer Prototype • Consists of three modules: • 1. Geometry query module • 2. Geometric Tool Kit • 3. Feature identification module (feature hint generator, feature completer, feature validator) Feature Recognizer Prototype: 3 of 4
Feature Recognizer Prototype • Modules interact with CAD system to extract and process relevant part information to generate machining feature model Feature Recognizer Prototype: 4 of 4
Table of Contents • 1. Introduction • 2. Approaches to Feature Recognition • 3. Methodology • 4. Feature Recognizer Prototype • 5. Case Studies • Slot Test • Coupling • Bracket • 6. Conclusion
Slot Test • Part design developed at Ohio University to test slot hint recognition algorithms • Contains only two extruded operations • First has feature sign create • Second has feature sign subtract • Both profiles contains rectilinear shapes • 14 possible slot hints Case Studies: 1 of 5
Slot Test (cont.) • Eight hints identified as invalid • Six hints validated • Six corresponding slots created • System generates duplicate hints, removed for clarity Case Studies: 2 of 5
Coupling • Simplified version of design from NIST design repository • Two extruded operations • First has feature sign create • Second has feature sign intersect Case Studies: 3 of 5
Coupling (cont.) • Six slot hints generated • Three discarded as invalid • Three hints validated • Three slots created from valid hints • Also recognized hole feature • “Steps” on outside of part not recognized; prototype algorithm doesn’t include analysis of step features Case Studies: 4 of 5
Bracket • Modeled using five extruded operations from more complex profiles than previous examples • Opportunity to test many of the rules in the system at once • System correctly decomposes complex profiles into simpler, interacting manufacturing features Case Studies: 5 of 5
Table of Contents • 1. Introduction • 2. Approaches to Feature Recognition • 3. Methodology • 4. Feature Recognizer Prototype • 5. Case Studies • 6. Conclusion
Conclusion • Developed feature recognition procedure for solid models created via extruded operations • Reduced hint generation/verification to 2D problem; simpler calculations and better rejection rate of invalid hints • Integrated with existing process planning software (IMPlanner) Conclusion: 1 of 2
Conclusion (cont.) • Direct use of CAD model while maintaining system independence • Feature recognition algorithms operate on objects replicated from CAD model input but maintain independence from CAD system Conclusion: 2 of 2
Kyle Sigo and Andrew Lowe Recognition of volumetric features using 2d hints