Exploring Backtracking Solutions in Optimization Problems and Search Algorithms
This lecture covers the concept of backtracking in optimization and search problems, focusing on how to construct solution vectors and navigate search spaces. Using examples like the n-queens problem and the subset sum problem, we illustrate the strategies for finding feasible solutions while adhering to given constraints. The discussion includes both explicit and implicit constraints that shape the solution space, as well as the tree-like structure of the search space. Backtracking is demonstrated as a method to systematically explore potential solutions and prune infeasible paths efficiently.

Exploring Backtracking Solutions in Optimization Problems and Search Algorithms
E N D
Presentation Transcript
Solution vectors • In optimization problems, or more general in search problems, a set of choices are to be made to arrive at an optimum or solution. • A solution can be written in the form of a vector X = (x1,x2,..,xn) and the search is directed by criterion P, defining feasible choices of X. • Often P can also decide whether a partial solution Xi=(x1,..,xi), in, is feasible, ie, there are extensions of Xi to a feasible solution. • We can either search for one solution, or we can search for all solutions.
Constraints • Explicit constraints define the domain of the choice variables, eg xi>0, or xi=0 or 1, or li<xi<ui. • Implicit constraints specify that x1 .. xi satisfy P, ie relate the xi-s to each other. • The explicit constraints define a possible solution spacefor the problem • The implicit constraints narrow the solution space down to an answer space.
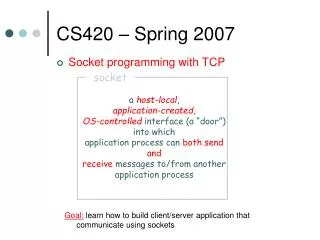
Search Spaces • We concern us here with tree shaped spaces • A prefix x1 .. xi is a path from the root (the empty vector) with edges labeled x1 to xi • Children of xi form solution vectors of the form x1 .. xi+1.
n Queens • Given an nxn chessboard and n queens, find all placements of the queens such that none of them attack each other • none of the queens occupy the same row, column, or diagonal. • As each queen occupies her own row, a (partial) choice vector X is a vector of integers from 1 to n, where xj is the column for the queen in row j. • One solution to the 4-queens problem is (2,4,1,3)
4 queens 2 4 1 3 solution Q Q Q Q
Solution space for n-Queens • root has n children, 1 for each column • each of these has n-1 children, excluding its own column • next has n-2 children etc. • so the tree has n! nodes / states, many of these are infeasible • diagonal constraint • n! is a gross overestimate of the number of states we need to check
Subset sum (SSS) • Given a set of integers m1 to mn and another integer M, find all subsets of mi-s such that their sum is M • Eg for m ={1,2,3}, M=3 we have two solutions {1,2} and {3}.
Solution Vectors for SSS • One option: the indices of the chosen elements • then solution vectors have different length
Solution Vectors for SSS X1=1 X1=3 X1=2 X2=2 X2=3 X2=3 • One option: the indices of the chosen elements • then solution vectors have different length X3=3
Alternative • Another, more regular, solution space has nodes with up to n choice values ci = 0 if mi is not in the subset and ci = 1 if it is. • In this case the leaves represent the subsets.
C1= 1 C1= 0 Alternative C2= 0 C2= 0 C2= 1 C2= 1 C3= 0 C3= 1 C3= 0 C3= 0 C3= 1 C3= 1 C3= 1 C3= 0 • Another, more regular, solution space has nodes with up to n choice values ci = 0 if mi is not in the subset and ci = 1 if it is. • In this case the leaves represent the subsets.
Backtrack • Backtrack walks depth first through the solution space • and uses the criterion P (sometimes called bounding function B) to prune the solution space to create the answer space.
Iterative Backtrack • We are searching for all possible answers. • X will hold the (partial) solution vector (x1,x2,..,xi). • B is the bounding function. • Next(X) is the set of valid next states xi+1 from state xi , and therefore Bi+1(X[1..(i+1)) is true for all states in Next(X) and false for all other states. • We also need a function that decides whether a state is an answer state.
IBackTrack(n){ k = 1 while (k>0) { if (there remains an x in Next(X[1..(k-1)]) and Bk(X[1..k]) ) { if (X[1..k] is path to answer node) print X[1..k] // end if k++ // consider next set } else k-- // backtrack to previous set } }
k=1 x=[] cap = 3 X1=1 X1=3 X1=2 X2=2 X2=3 X2=3 IBackTrack(n){ k = 1 while (k>0) { if (there remains an x in Next(X[1..(k-1)]) and Bk(X[1..k]) ) { if (X[1..k] is path to answer node) print X[1..k] // end if k++ // consider next set } else k-- // backtrack to previous set } } X3=3
k=2 x=[1] feasible cap=2 X1=1 X1=3 X1=2 X2=2 X2=3 X2=3 IBackTrack(n){ k = 1 while (k>0) { if (there remains an x in Next(X[1..(k-1)]) and Bk(X[1..k]) ) { if (X[1..k] is path to answer node) print X[1..k] // end if k++ // consider next set } else k-- // backtrack to previous set } } X3=3
k=3 x=[1,2] answer path cap=0 print X=[1,2] X1=1 X1=3 X1=2 X2=2 X2=3 X2=3 IBackTrack(n){ k = 1 while (k>0) { if (there remains an x in Next(X[1..(k-1)]) and Bk(X[1..k]) ) { if (X[1..k] is path to answer node) print X[1..k] // end if k++ // consider next set } else k-- // backtrack to previous set } } X3=3
k=3 x=[1,2,3] infeasible backtrack X1=1 X1=3 X1=2 X2=2 X2=3 X2=3 IBackTrack(n){ k = 1 while (k>0) { if (there remains an x in Next(X[1..(k-1)]) and Bk(X[1..k]) ) { if (X[1..k] is path to answer node) print X[1..k] // end if k++ // consider next set } else k-- // backtrack to previous set } } X3=3
k=2 X=[1,3] infeasible backtrack X1=1 X1=3 X1=2 X2=2 X2=3 X2=3 IBackTrack(n){ k = 1 while (k>0) { if (there remains an x in Next(X[1..(k-1)]) and Bk(X[1..k]) ) { if (X[1..k] is path to answer node) print X[1..k] // end if k++ // consider next set } else k-- // backtrack to previous set } } X3=3
k=1 X=[2] feasible X1=1 X1=3 X1=2 X2=2 X2=3 X2=3 IBackTrack(n){ k = 1 while (k>0) { if (there remains an x in Next(X[1..(k-1)]) and Bk(X[1..k]) ) { if (X[1..k] is path to answer node) print X[1..k] // end if k++ // consider next set } else k-- // backtrack to previous set } } X3=3
k=2 X=[2,3] infeasible backtrack X1=1 X1=3 X1=2 X2=2 X2=3 X2=3 IBackTrack(n){ k = 1 while (k>0) { if (there remains an x in Next(X[1..(k-1)]) and Bk(X[1..k]) ) { if (X[1..k] is path to answer node) print X[1..k] // end if k++ // consider next set } else k-- // backtrack to previous set } } X3=3
k=1 X=[3] feasible X1=1 X1=3 X1=2 X2=2 X2=3 X2=3 IBackTrack(n){ k = 1 while (k>0) { if (there remains an x in Next(X[1..(k-1)]) and Bk(X[1..k]) ) { if (X[1..k] is path to answer node) print X[1..k] // end if k++ // consider next set } else k-- // backtrack to previous set } } X3=3
k=2 X=[3] cap=0 path to answer node print X=[3] X1=1 X1=3 X1=2 X2=2 X2=3 X2=3 IBackTrack(n){ k = 1 while (k>0) { if (there remains an x in Next(X[1..(k-1)]) and Bk(X[1..k]) ) { if (X[1..k] is path to answer node) print X[1..k] // end if k++ // consider next set } else k-- // backtrack to previous set } } X3=3
paths to answer node X=[1,2] X=[3] X1=1 X1=3 X1=2 X2=2 X2=3 X2=3 IBackTrack(n){ k = 1 while (k>0) { if (there remains an x in Next(X[1..(k-1)]) and Bk(X[1..k]) ) { if (X[1..k] is path to answer node) print X[1..k] // end if k++ // consider next set } else k-- // backtrack to previous set } } X3=3
Recursive back track • global variable X[1:n], initial call RBackTrack(1) RBackTrack(k) { for each X[k] with Bk(X[1..k])==true if (X[1..k] is a path to an answer state) print(X[1..k] RBackTrack(k+1) }
n-queens • X[1:k] is a partial solution with X[i] the column number (1..n) of a queen in row i 1:k. • When we place queen k+1 we need to check that she does not occupy any of the already occupied columns (that's easy) and any of the already occupied diagonals: • two queens in (i,j) (row i, column j) and (p,q) occupy the same diagonal if (i-j) == (p-q) or (i+j)==(p+q), which is equivalent with |i-p|==|j-q|.
iterative n-queens with global partial solution X Place(k) for (i = 1 to k-1) if (X[i]==X[k] or // same columns | X[i]-X[k] | == |i-k| ) // same diagonal return(false); // end for return(true)
nQueens(n) { X[1] = 0 //place first queen "in front of" row 1 k=1 while (k>0) { X[k]++ // move queen k to next column while (X[k]<=n and not(Place(k)) { X[k]++ } if (X[k] <= n) // found valid spot for queen k if (k==n) print(X) else {k++; X[k]=0} // start next row else k-- // backtrack }
Sum of Subsets • Two ways to represent the search space for subset sum. • Here we consider the regular case with choices xi=0 (do not take object i) and xi=1 (take object i) at level i. • A choice for the bounding function Bk =
Simplifying / Strengthening assumption for SSS • From hereon we assume that the objects are sorted in non-decreasing order, because this allows us to strengthen our observations.
Weight gathered so far • In some state X[1..k] at level k the total weight gathered by objects 1 to kis either M, and we have found a solution and thus we don't need to go deeper in that state... • or the weight gathered is less than M, and then X[1..k] cannot lead to an answer node if
Weight gathered so far • In some state X[1..k] at level k the total weight gathered by objects 1 to kis either M, and we have found a solution and thus we don't need to go deeper in that state... • or the weight gathered is less than M, and then X[1..k] cannot lead to an answer node if • WHY?
A better bound • Original bound plus previous observation leads to a better bound: not too little and not too much
Recursive SSS • s is the weight gathered by the objects chosen so far, and thus needs to be initialized at 0 • r is the total weight of the remaining objects, and thus needs to be initialized at the sum SumW of all the weights. • kis the current 1-based level. If we take object k we can simplify the bound test because the sum of the weights of the chosen objects (now including k) plus remaining objects has not changed and is still >= M • The initial call is SumOfSub(0,1,SumW).
No degenerate problems We assume that W[1]<=M and SumW>=M, otherwise we have a degenerate problem.
SumOfSub(s,k,r) { // two possible next states X[k] = 1 //1: take object k, we can: Bk-1 = true if (s+W[k]==M) print X[1..k] // subset found else (if s+W[k]+W[k+1]<=M) // Bk = true SumOfSub(s+W[k],k+1,r-W[k]) // do not take object k, // now we have to check whether the rest // of the objects still can reach M and // the lightest remaining object is not too heavy if (s + r - W[k] >= M // still can reach M and s+W[k+1] <=M // rest objects not too heavy ) SumOfSub(s,k+1,r-W[k]) }
SumOfSub(s,k,r) { // two possible next states X[k] = 1 //1: take object k, we can: Bk-1 = true if (s+W[k]==M) print X[1..k] // subset found else (if s+W[k]+W[k+1]<=M) // Bk = true SumOfSub(s+W[k],k+1,r-W[k]) // do not take object k, // now we have to check whether the rest // of the objects still can reach M and // the lightest remaining object is not too heavy if (s + r - W[k] >= M // still can reach M and s+W[k+1] <=M // rest objects not too heavy ) SumOfSub(s,k+1,r-W[k]) } Notice that the algorithm does not check k<=n. This is implicit in the fact that when SumOfSub is called s<M and s+r>M, hence r>0 and thus k<=n.