Hybrid variational-ensemble data assimilation (HVEDAS)
220 likes | 412 Vues
Hybrid variational-ensemble data assimilation (HVEDAS). Daryl T. Kleist 1,3 Dave Parrish 1 , John Derber 1 ,Jeff Whitaker 2 , Kayo Ide 3 , & Xuguang Wang 4. 1 NOAA/NCEP/EMC, 2 NOAA/ESRL, 3 University of Maryland-College Park, 4 University of Oklahoma.

Hybrid variational-ensemble data assimilation (HVEDAS)
E N D
Presentation Transcript
Hybrid variational-ensemble data assimilation(HVEDAS) Daryl T. Kleist1,3Dave Parrish1, John Derber1,Jeff Whitaker2, Kayo Ide3, & Xuguang Wang4 1NOAA/NCEP/EMC, 2NOAA/ESRL, 3University of Maryland-College Park, 4University of Oklahoma High Impact Weather Working Group Workshop24 February, 2011 – Norman, OK
Variational Data Assimilation J : Penalty (Fit to background + Fit to observations + Constraints) x’ : Analysis increment (xa – xb) ; where xb is a background BVar : Background error covariance H : Observations (forward) operator (eg. CRTM) R : Observation error covariance (Instrument + representativeness) yo’ : Observation innovations Jc : Constraints (physical quantities, balance/noise, etc.) B is typically static and estimated a-priori/offline
Motivation • Current background error covariance (applied operationally) in VAR • Isotropic recursive filters • Poor handle on cross-variable covariance • Minimal flow-dependence added • Implicit flow-dependence through linearization in normal mode constraint (Kleist et al. 2009) • Flow-dependent variances (only for wind, temperature, and pressure) based on background tendencies • Tuned NMC-based estimate (lagged forecast pairs)
Hybrid Variational-Ensemble • Incorporate ensemble perturbations directly into variational cost function through extended control variable • Lorenc (2003), Buehner (2005), Wang et. al. (2007), etc. bf & be: weighting coefficients for fixed and ensemble covariance respectively xt: (total increment) sum of increment from fixed/static B (xf) and ensemble B ak: extended control variable; :ensemble perturbation L: correlation matrix [localization on ensemble perturbations]
Why Hybrid? Acknowledgement: Xuguang Wang
Hybrid with (global) GSI • Control variable has been implemented into GSI 3DVAR* • Full B preconditioning (Wang 2011) • Working on extensions to B1/2 preconditioned minimization options • Spectral filter for horizontal part of A • Eventually replace with (anisotropic) recursive filters • Recursive filter used for vertical • Dual resolution capability • Ensemble can be from different resolution than background/analysis (vertical levels are the exception) • Various localization options for A • Grid units or scale height • Level dependent (plans to expand) • Option to apply TLNMC (Kleist et al. 2009) to analysis increment *Acknowledgement: Dave Parrish for original implementation of extended control variable
Single Observation Single 850mb Tv observation (1K O-F, 1K error)
Single Observation Single ps observation (-2mb O-F, 1mb error) near center of Hurricane Ike
Single Observation Single 850mb zonal wind observation (3 m/s O-F, 1m/s error) in Hurricane Ike circulation
Dual-Res Coupled Hybrid member 1 forecast member 1 analysis EnKF member update member 2 forecast recenter analysis ensemble member 2 analysis member 3 analysis member 3 forecast GSI Hybrid Ens/Var high res forecast high res analysis Previous Cycle Current Update Cycle
Hybrid Var-EnKF GFS experiment • Model • GFS deterministic (T574L64; post July 2010 version – current operational version) • GFS ensemble (T254L64) • 80 ensemble members, EnKF update, GSI for observation operators • Observations • All operationally available observations (including radiances) • Includes early (GFS) and late (GDAS/cycled) cycles as in production • Dual-resolution/Coupled • High resolution control/deterministic component • Includes TC Relocation on guess • Ensemble is recentered every cycle about hybrid analysis • Discard ensemble mean analysis • Satellite bias corrections • Coefficients come from GSI/VAR • Parameter settings • 1/3 static B, 2/3 ensemble • Fixed localization: 800km & 1.5 scale heights • Test Period • 15 July 2010 – 15 October 2010 (first two weeks ignored for “spin-up”)
500 hPa Anom.Corr. Northern Hemisphere Southern Hemisphere
Forecast Fits to Obs (Tropical Winds) Forecasts from hybrid analyses fit observation much better.
Tropical Wind Errors (72hr) Verification against ‘consensus analysis’ [ECMWF, NCEP, UKMET]
HVEDAS (3D) for GDAS/GFS • Prototype dual-resolution, two-way coupled hybrid Var/EnKF system outperforms standard 3DVAR in GFS experiments • 2010 Hurricane Season (August 15 through October 31 2010) run off-site • Emphasis on AC, RMSE, TC Tracks • Plan underway to implement into GDAS/GFS operationally • Target: Spring 2012 (subject to many potential issues) • Porting of codes/scripts back to IBM P6 • Cost analysis (will everything fit in production suite?) • More thorough (pre-implementation) testing and evaluation • More test periods (including NH winter) • Other/more verification metrics • Potential moratorium associated with move to new NCEP facility • Issues • Weighting between ensemble and static B • Localization • How should EnKF be used within ensemble forecasting paradigm?
HVEDAS Extension to other Applications • Expand hybrid to 4D • Hybrid within ‘traditional 4DVAR’ (with adjoint) • Pure ensemble 4DVAR (non-adjoint) • Ensemble 4DVAR with static B supplement (non-adjoint) • Non-GFS applications in development • NASA GEOS-5 (GMAO) • NAM (Dave Parrish, others) • Hurricanes/HWRF (Mingjing Tong, HFIP, many collaborators) • Storm-scale initialization (Jacob Carley, collaborators) • RR (Xuguang Wang, Ming Xue, Stan Benjamin, Jeff Whitaker, Steve Weygandt, others) • NCEP strives to have single DA system to develop, maintain, and run operationally (global, mesoscale, severe weather, hurricanes, etc.) • GSI (including hybrid development) is community code supported through DTC • EnKF used for GFS-based hybrid being expanded for use with other applications
Applications of hybrid DA • WRFVAR based hybrid (Wang et al 2008ab, MWR) • Application for hurricane track forecasts (Wang 2011, WAF) • For radar data assimilation for hurricanes, Li et al. • FAA application with GSI-based hybrid, Zhu et al. Li et al. 2011
GSI-based ‘ensemble 4DVAR’ • A natural extension of 3DVAR-based hybrid with no static covariance B. • Temporal evolution of the increment is obtained through evolved ensemble perturbations in the assimilation window. • ens4dvar is a 4DVAR with no need for tangent linear and adjoint of the forecast model (Liu et al. 2009). Lei, Wang et al. 2011
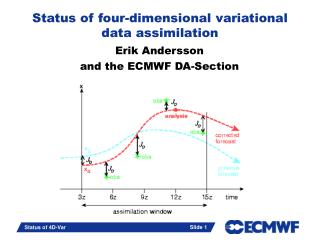
Temporal evolution of the error covariance Temp. t t+3h t-3h Height t-3h t t+3h Upstream impact Downstream impact