A Simple Navigation Problem
This paper presents a new model for tackling navigation problems using discrete time points and observations of angles and distances. By employing particle filter algorithms, we can simulate and track states effectively in various applications such as terrain navigation, tracking models, and tomographic scenarios. The proposed solution incorporates known parameters and generates estimates by combining likelihoods and priors through Taylor series expansions. We demonstrate the algorithm's efficacy by comparing particle filter estimates with ground truth and noisy measurements.

A Simple Navigation Problem
E N D
Presentation Transcript
A Simple Navigation Problem By Marc Sobel Work joint with Iyad Obeid and John Montney (Computer and Electrical Engineering)
New Model • Discrete time points t=1,….,n • Observe only angles and distances:
Applications • Application to: • (1) Terrain navigation; • (2) Tracking Models • (3) Tomographic Models
Particle Filter. Simplest Method: Assume alpha and beta known. • Generate preliminary t’th generation values from the prior distributions: (k=1,….,100)
More Generally • Simulate states from • This usually reduces to:
Algorithms • Extended Kalman Filters • Accept Reject algorithms • Auxiliary variables • Mixture methods
Weights (simplest story) • Assign the weight (k=1,…,K)
Append • Append the t’th values to the already created particles:
Resample • Resample the particles • According to the weights;
Create Algorithm • function f = create(eta1,eta2,eta3,eta4,alph,bet,x,y,n) • X = cumsum([x alph+eta3*randn(1,n-1)]); • Y = cumsum([y bet+eta4*randn(1,n-1)]); • Z = atan(Y./X) + eta1*randn(size(X)); • d = sqrt(X.^2 + Y.^2) + eta2*randn(size(X)); • plot(X,Y,'r-x'); • hold on • plot(d.*cos(Z),d.*sin(Z),'-+'); • mx = 1.5*max([alph bet])*n; • axis([0 mx 0 mx]); • f = [Z' d' X' Y'];
Particle Filter Algorithm • function [fp,fq] = pfreal(a,d,eta1,eta2,eta3,eta4,x,y,alph,bet,n) • nParticles = 500; • p = zeros(nParticles,1); • q = zeros(nParticles,1); • fp = zeros(nParticles,n); • fq = zeros(nParticles,n); • wt_u_prev = ones(nParticles,1); • % initialize all states to x and y, respectively • p(:) = x; fp(:,1) = x; • q(:) = y; fq(:,1) = y; • for ii = 2:n • % inital particle estimate of ii'th generation • p(:) = fp(:,ii-1) + alph + eta3*randn(nParticles,1); • q(:) = fq(:,ii-1) + bet + eta4*randn(nParticles,1); • wt_u_curr = wt_u_prev .* normpdf(a(ii) , atan(q./p) , eta1); • wt_u_curr = wt_u_curr .* normpdf(d(ii) , sqrt(p.^2 + q.^2) , eta2); • wt_n_curr = wt_u_curr ./ sum(wt_u_curr); • in = randsample(1:nParticles,nParticles,true,wt_n_curr); • fp(:,ii) = p(in); • fq(:,ii) = q(in); • wt_u_prev = wt_u_curr; • end
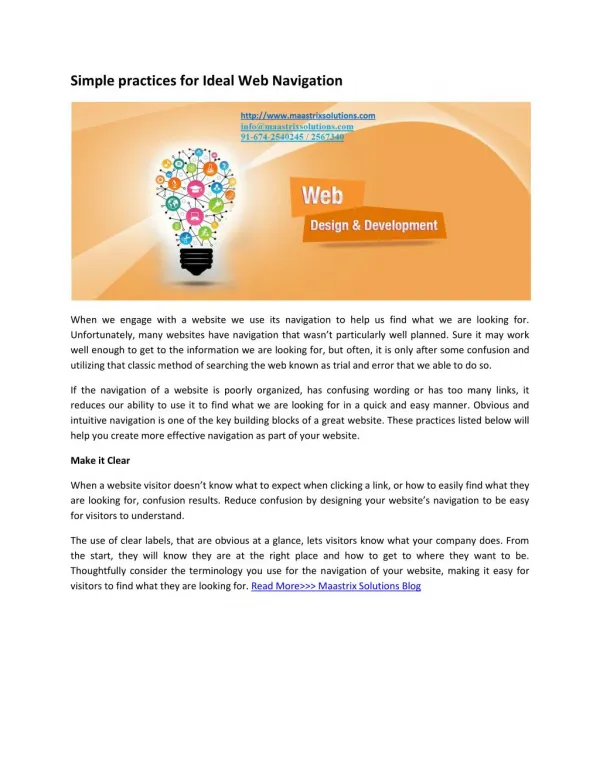
Particle Filter Estimates compared with the Ground truth and noisy observations
A new idea: use Taylor Series • We get the following expansions:
Plug in • Plug these in to get
Combine likelihood and prior • Combine the likelihood with prior to get an approximate updated gaussian for the x’s and y’s. Use this updated gaussian as a proposal distribution.