Work
Work. Transformation rules define alternate sets of coordinates. 3 N Cartesian coordinates x i f generalized coordinates q m Select f degrees of freedom Small changes in a coordinate can be expressed by the chain rule. Generalized Coordinates. polar coordinate example.

Work
E N D
Presentation Transcript
Transformation rules define alternate sets of coordinates. 3N Cartesian coordinates xi f generalized coordinates qm Select f degrees of freedom Small changes in a coordinate can be expressed by the chain rule. Generalized Coordinates polar coordinate example
The differentials for the coordinates don’t depend on the coordinates themselves. The time derivative gives generalized velocities. One per generalized coordinate A general identity relates the generalized coordinates and velocities. Generalized Velocity
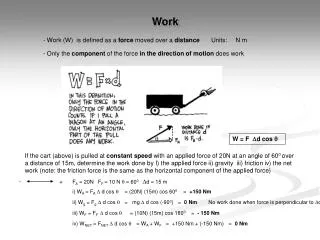
Force acting over a small displacement is the work. Express in generalized coordinates Rewrite the work in terms of the generalized force components, Qm, Qt Last term for time dependence Generalized Force
Constraint Forces • All the Qm are applied forces. • No dependence on constraint coordinates • Not forces of constraint • Constraint forces do no work • Forces of constraint are often unknown. • Newtonian problem complicated by them
A conservative force derives from a potential V. The generalized force can be derived from the same potential. Work expressed in terms of potential energy if conservative force Potential Energy
The work can be expressed by mass and acceleration. Mass m(i) related to xi The Cartesian coordinate is transformed to the generalized coordinate. Use the boxed identity Work expanded in terms Acceleration and Velocity
Kinetic Energy • The velocity can be used to find the kinetic energy T. • Rearranging summation
Work Compared • Work in terms of the kinetic energy must equal the work in terms of the force. • Each generalized component considered separately • Time-dependent part just Newton’s 2nd law trivial identity; ma=F
Lagrangian Function • Conservative forces depend only on position. • Leave non-conservative forces on the right side of the equation • The quantity L = T-V is the Lagrangian. • This gives Lagrange’s equations of motion. • For f equations, 2f constants next