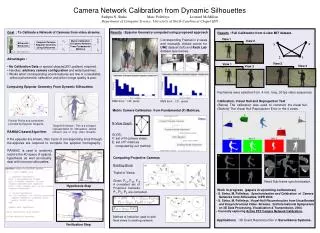
Estimating Epipolar Geometry from Two Local Affine Frame Correspondences
This paper addresses the challenge of wide-baseline stereo with significant viewpoint and scale changes. It presents a novel approach whereby only two correspondences of Local Affine Frames (LAFs) are utilized to accurately estimate epipolar geometry. The authors detail the correspondence problem, verification using RANSAC, and introduce a 2LAF-LO-RANSAC algorithm designed to overcome issues posed by planar degeneracy. Experimental results showcase the efficiency of their method compared to existing approaches, demonstrating promising outcomes in diverse scenarios.

Estimating Epipolar Geometry from Two Local Affine Frame Correspondences
E N D
Presentation Transcript
Epipolar Geometry from Two Correspondences Michal Perďoch, Jiří Matas, Ondřej Chum Center for Machine Perception Czech Technical University, Prague http://cmp.felk.cvut.cz
Problem formulation Problem: Wide-baseline stereo with severe viewpoint and scale change. Message of this paper: Two correspondences of Local Affine Frames suffice to estimate epipolar geometry. Perďoch M., Matas J., Chum O.: Epipolar Geometry from Two Correspondences, CTU Prague2/16
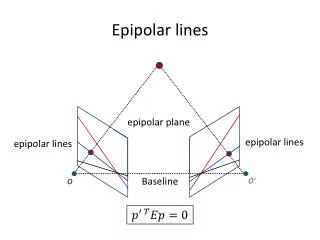
Local Affine Frame correspondences Local Affine Frames (LAFs), MatasICPR2002: • Affine-covariantly detected local coordinate systems. • Onematching LAF pair providesthree point-to-point correspondences. Perďoch M., Matas J., Chum O.: Epipolar Geometry from Two Correspondences, CTU Prague3/16
The correspondence problem Wide-baseline stereo framework (Matas ICPR2002): • Detect regions. MSERs are used here. • Build Local Affine Frames,define Measurement Region. • Geometric and photometric normalisation of MRs. • Establish correspondencesby nearest neighbour search. • Verify correspondences, • estimate model using • RANSAC. Perďoch M., Matas J., Chum O.: Epipolar Geometry from Two Correspondences, CTU Prague4/16
RANSAC Algorithm • How to find correct model of EG in presence of outliers? • RANSAC - widely used robust estimator proposed by Fishler and Bolles 1988. • Hypothesise & verify search: Perďoch M., Matas J., Chum O.: Epipolar Geometry from Two Correspondences, CTU Prague5/16
RANSAC Algorithm • Average number of RANSAC samples k: • Example (h0 = 0.01): • ChumDAGM2003, has shown that the theoretical number of samples can be achieved by introducing Local Optimisationstep. – probability of finding a better model – proportion of inliers – size of the sample 2 LAFs 3 LAFs 7 points Perďoch M., Matas J., Chum O.: Epipolar Geometry from Two Correspondences, CTU Prague6/16
Proposed by ChumDAGM2003, used with 3LAFs and seven point-to-point correspondences. Input: set of data points T, confidence h0. Output: model M* of EG with the largest support S*. Repeat Draw a random sample of minimal size m from datapoints. Compute model parameters Mi and its support Si. If new maximum was detected (i.e., |Si| > |Sj| for (j <i): Apply local optimisation. Store the best model with support S*. Until the probability of finding model better than S*falls under h0. LO-RANSAC Algorithm Perďoch M., Matas J., Chum O.: Epipolar Geometry from Two Correspondences, CTU Prague7/16
Six Point EG estimator • Stewénius CVPR2005has shown that EG can be estimated from six points under following assumptions on the cameras: • Unit aspect ratio, zero skew, principal point in the middle of the image. • Unknown but the same focal length. • We take Stewénius’ assumptions. • Is it possible to estimate EG from two Local Affine Frame correspondences? Perďoch M., Matas J., Chum O.: Epipolar Geometry from Two Correspondences, CTU Prague8/16
Planar Degeneracy • ChumCVPR2005 has that planar degeneracy causes suboptimal EG estimates. • Six points on a plane do not provide enough constraints for estimation of the fundamental matrix. • Planar degeneracy test - take sample points and check if they lie on a plane. • When a plane is detected do plane and parallax search: • Local optimisation that takes into account plane found. • Sample another pair not consistent with the plane and compute fundamental matrix Perďoch M., Matas J., Chum O.: Epipolar Geometry from Two Correspondences, CTU Prague9/16
Input: set of data points T, confidence h0, sample size m = 2. Output: model M*of EG with largest support S*. Repeat Draw a random sample of minimal size m from data points. Compute model parametersMi and its support Si. If new maximum has occurred (i.e. |Si| > |Sj| for (j < i): If a degenerated sample configuration is detected: Perform plane-and-parallax search for EG, otherwise Apply local optimisation. Store the best model with support S*. Until the probability of finding model better than S*falls under h0. 2LAF-LO-RANSAC Algorithm Performed at most log(k) times. Perďoch M., Matas J., Chum O.: Epipolar Geometry from Two Correspondences, CTU Prague10/16
Experiments: Scenes Corner e= 0.26 The China Wall e = 0.28 Wash e = 0.23 Perďoch M., Matas J., Chum O.: Epipolar Geometry from Two Correspondences, CTU Prague11/16
Experiment 1: Efficiency • What is the “efficiency” of six point estimator? Is the planar degeneracy test necessary? • Comparison of 2LAF, 3LAF with and without planar degeneracy test and PTS7 algorithm against reference EG. • Number of good EG models generated from 1000 all-inlier samples(quality is measured by number of inliers, good – at least 90%). ND - without degeneracy test Perďoch M., Matas J., Chum O.: Epipolar Geometry from Two Correspondences, CTU Prague12/16
Experiment 2: Performance • Average number of inliers and samples measured in hundred runs of 7PTS, 3LAF, 2LAF-LO-RANSAC algorithms. • Small drop (two to four percent) in average number of inliers on difficult and noisy scenes for both 3LAF and 2LAF algorithm. • Note the significant speedup(measured by number of samples) of 2LAF algorithm. Perďoch M., Matas J., Chum O.: Epipolar Geometry from Two Correspondences, CTU Prague13/16
Experiment 3: Assumptions violation • The six point solver assumes equal focal length in both images. • The focal length ratio on the scene Corner is 1:3 andoff-plane rotation about 30 degrees. • No performance drop was observed. Perďoch M., Matas J., Chum O.: Epipolar Geometry from Two Correspondences, CTU Prague14/16
Experiment 3: Assumptions violation • Robustness to change of pixel aspect ratio was measured on scene China Wall (#inliers in 100 runs). • Width of pixel scaled: 0.5, 1.0, 2.0 times from top to bottom. Perďoch M., Matas J., Chum O.: Epipolar Geometry from Two Correspondences, CTU Prague15/16
Conclusions • Contribution • Novel wide-baseline stereo algorithm using two LAF correspondences was proposed. • 6 point (= 2 LAFs) EG estimator can be used in LO-RANSAC framework with the planar degeneracy test. • Performance was experimentally tested and compared to 7PTS and 3LAF algorithms in wide-baseline stereo setup. • Future work • Detect other degenerated configurations. • Compare the number of verifications instead of the number of samples. Thank you for your attention. Perďoch M., Matas J., Chum O.: Epipolar Geometry from Two Correspondences, CTU Prague16/16