Image Processing: Linear Filtering
Image Processing: Linear Filtering. Modifikasi dari: Prof. Zhou Wang, Texas Univ., 2006. Linear Filtering. Spatial Domain Linear Filtering Frequency (2D-DFT) Domain Filtering Linear Image Restoration. Image Restoration. Blur. From Prof. Xin Li. out-of-focus blur. motion blur.

Image Processing: Linear Filtering
E N D
Presentation Transcript
Image Processing:Linear Filtering Modifikasi dari: Prof. Zhou Wang, Texas Univ., 2006
Linear Filtering • Spatial Domain Linear Filtering • Frequency (2D-DFT) Domain Filtering • Linear Image Restoration
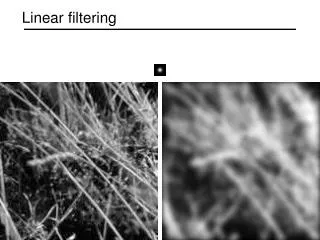
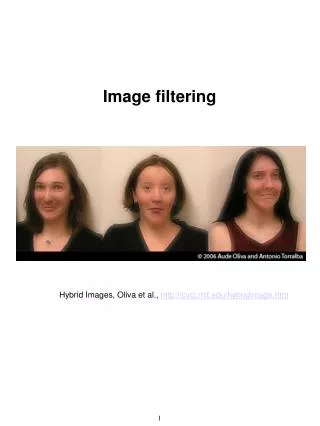
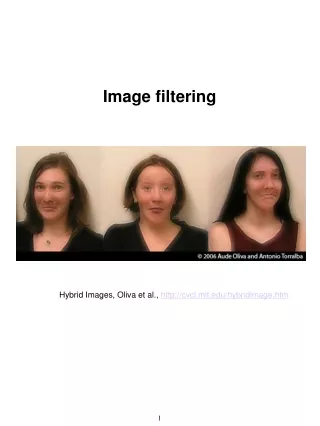
Blur From Prof. Xin Li out-of-focus blur motion blur Question 1: How do you know they are blurred? I’ve not shown you the originals! Question 2: How do I deblur an image?
Linear Blur Model • Spatial domain h(m,n) x(m,n) y(m,n) blurring filter From Prof. Xin Li Gaussian blur motion blur
Linear Blur Model • Frequency (2D-DFT) domain H(u,v) X(u,v) Y(u,v) blurring filter From Prof. Xin Li Gaussian blur motion blur
Blurring Effect Gaussian blur motion blur From [Gonzalez & Woods]
^ ^ ^ x(m,n) x(m,n) x(m,n) Image Restoration: Deblurring/Deconvolution h(m,n) x(m,n) y(m,n) g(m,n) blurring filter deblurring/ deconvolution filter • Non-blind deblurring/deconvolution • Given: observation y(m,n) and blurring function h(m,n) • Design: g(m,n), such that the distortion between x(m,n) and • is minimized • Blind deblurring/deconvolution • Given: observation y(m,n) • Design: g(m,n), such that the distortion between x(m,n) and • is minimized
^ x(m,n) Deblurring: Inverse Filtering h(m,n) x(m,n) y(m,n) g(m,n) blurring filter inverse filter X(u,v) H(u,v) = Y(u,v) 1 G(u,v) = H(u,v) Y(u,v) 1 X(u,v) = = Y(u,v) Exact recovery! H(u,v) H(u,v)
^ x(m,n) Deblurring: Pseudo-Inverse Filtering h(m,n) x(m,n) y(m,n) g(m,n) blurring filter deblur filter 1 What if at some(u,v), H(u,v) is 0 (or very close to 0) ? Inverse filter: G(u,v) = H(u,v) small threshold Pseudo-inverse filter:
Inverse and Pseudo-Inverse Filtering blurred image Adapted from Prof. Xin Li = 0.1
+ More Realistic Distortion Model additive white Gaussian noise w(m,n) y(m,n) ^ h(m,n) g(m,n) x(m,n) x(m,n) blurring filter deblur filter Y(u,v) = X(u,v) H(u,v) + W(u,v) • What happens when an inverse filter is applied? close to zero at high frequencies
Radially Limited Inverse Filtering Radially limited inverse filter: • Motivation • Energy of image signals is concentrated at low frequencies • Energy of noise uniformly is distributed over all frequencies • Inverse filtering of image signal dominated regions only R
Radially Limited Inverse Filtering Image size: 480x480 Original Blurred Inverse filtered Radially limited inverse filtering: R = 85 R = 40 R = 70 From [Gonzalez & Woods]
Wiener (Least Square) Filtering Wiener filter: noise power signal power • Optimal in the least MSE sense, i.e. • G(u, v) is the best possible linear filter that minimizes • Have to estimate signal and noise power
Weiner Filtering Inverse filtering Blurred image Radially limited inverse filtering R = 70 Weiner filtering From [Gonzalez & Woods]
Inverse vs. Weiner Filtering distorted inverse filtering Wiener filtering motion blur + noise less noise less noise From [Gonzalez & Woods]
+ Weiner Image Denoising w(m,n) y(m,n) h(m,n) x(m,n) • What if no blur, but only noise, i.e. h(m,n) is an impulse or H(u, v) = 1 ? Wiener filter: where for H(u,v) = 1 Wiener denoising filter: Typically applied locally in space
Weiner Image Denoising adding noise noise var = 400 local Wiener denoising
Summary of Linear Image Restoration Filters 1 Inverse filter: G(u,v) = H(u,v) Pseudo-inverse filter: Radially limited inverse filter: where Wiener filter: Wiener denoising filter:
Examples • A blur filter h(m,n) has a 2D-DFT given by • Find the deblur filter G(u,v) using • The inverse filtering approach • The pseudo-inverse filtering approach, with = 0.05 • The pseudo-inverse filtering approach, with = 0.2 • Wiener filtering approach, with and
Examples • Inverse filter • Pseudo-inverse filter, with = 0.05
Examples • Pseudo-inverse filter, with = 0.2 • Wiener filter, with and
Advanced Image Restoration • Adaptive Processing • Spatial adaptive • Frequency adaptive • Nonlinear Processing • Thresholding, coring … • Iterative restoration • Advanced Transformation / Modeling • Advanced image transforms, e.g., wavelet … • Statistical image modeling • Blind Deblurring / Deconvolution