Download

1 / 16
160 likes | 362 Vues
Sistim komunikasi antar robot dengan menggunakan wireless pada robot swarm KRCI 2008. Oleh: Zainal Arif 7105.030.017. Pembimbing: Akhmad Hendriawan ST. Latar Belakang. Latar Belakang. Solusi. Solusi. Permasalahan. Bagaimana menentukan koordinasi posisi antar robot.

E N D
Sistimkomunikasiantar robot denganmenggunakan wireless pada robot swarm KRCI 2008 Oleh: Zainal Arif 7105.030.017 Pembimbing: Akhmad Hendriawan ST
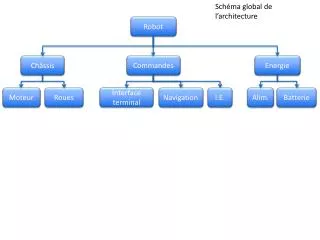
Permasalahan • Bagaimana menentukan koordinasi posisi antar robot. • Bagaimana robot mampu bekerja pada arena dengan bentuk ruangan yang berubah-ubah dengan berbagai halangan yang telah ditetapkan. • Bagaimana robot berkomunikasi dengan yang lain agar bisa menyelesaikan tugas dengan seefisien mungkin. • Bagaimana menentukan konfigurasi hardware untuk mendukung komunikasi antar robot.
BATASAN MASALAH • Robot hanya bekerja pada lapangan pertandingan dan sesuai dengan aturan Kontes Robot Cerdas Indonesia 2008 Divisi Expert Swarm. • Jumlah robot sebanyak dua buah yang nantinya disebut robot A jika robot pertamakali berhasil menemukan bayi dan yang lain disebut robot B. • Komunikasi yang terjadi antar robot adalah sbb: • Koordinasi posisi start kedua robot. • Ada tidaknya lilin di suatu ruangan di lantai bawah. • Pemberitahuan koordinasi terdekat dengan pintu tangga untuk naik ke lantai atas. • Pemberitahuan kepada robot B ketika robot A berhasil menemukan bayi. • Pemberitahuan kepada robot B ruangan yang nantinya boleh di masuki robot B di lantai atas. • Pemberitahuan posisi pertemuan antar kedua robot ketika misi kedua robot selesai.
6 Ke lantai 2 5 4 3 2 1 6 1 2 3 4 5 Penentuan koordinasi posisi robot
Alogaritma Pengenalan Arena Lapangan Robot START Jalankan Progarm maping area Ambil data koordinasi kedua robot END Cocokkan dengan 11 Konfigurasi lantai bawah N Y
Contoh Maping area Lapangan B2
6 Ke lantai 2 5 4 3 2 1 6 1 2 3 4 5
Permasalahan dari lantai 1 1. 6 Konfigurasi Lapangan Lantai Atas Ke lantai 2 11 Konfigurasi Lapangan Lantai Bawah
Permasalahan 2. Ke lantai 2 Posisi Home untuk Setiap Konfigurasi Lapangan ada di 6 Lokasi
Permasalahan 3. Penempatan lilin yang random, dengan jumlah lilin dua buah di lantai bawah dan satu buah lilin di lantai atas. 4. Penempatan boneka yang random di lantai atas