Topic 4.1 Extended B – Pendulum system SHM
80 likes | 292 Vues
θ m. Topic 4.1 Extended B – Pendulum system SHM. In its simplest form, a pendulum is a mass hanging from a string. The mass is called the pendulum bob. We initially displace the bob from the vertical by an angle θ m. We then release it, and watch it oscillate in harmonic motion.

Topic 4.1 Extended B – Pendulum system SHM
E N D
Presentation Transcript
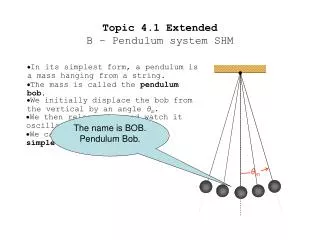
θm Topic 4.1 ExtendedB – Pendulum system SHM In its simplest form, a pendulum is a mass hanging from a string. The mass is called the pendulum bob. We initially displace the bob from the vertical by an angle θm. We then release it, and watch it oscillate in harmonic motion. The name is BOB. Pendulum Bob. We call a mass on a string a simple pendulum.
θ T θm mg Topic 4.1 ExtendedB – Pendulum system SHM THE SIMPLE PENDULUM Suppose during its oscillation the string makes an arbitrary angle θwith the vertical. At this instant two forces act on the bob: gravity and tension. Furthermore, the bob moves along the arc of a circle of radius ℓ, the length of the string. ℓ
FYI: Recall that sin θ=θ(for small enough θ), because sin θ=θ-θ3/3! + θ5/5! - … 0 T g ℓ g ℓ α = - θ θ” = - θ mg g ℓ g ℓ The simple pendulum Where ω = Where ω = FYI: The torque is a restoring torque, since it opposes the angular displacement θ. Thus we place the minus sign in the equation. (Recall F = -kx for the spring.) Topic 4.1 ExtendedB – Pendulum system SHM THE SIMPLE PENDULUM Since the mass is moving in a circle, we will use torque. If we let clockwise be positive we have Στ = Iα ℓTsin0°+ ℓmgsinθ = Iα θ Iα = ℓmgsinθ Question: What happened to the I? mℓ2α = -ℓmgθ Why? θ” = -ω2θ Clearly, the previous equation will have solutions θ(t) = θmsin(ωt + φ) θ(t) = θmcos(ωt + φ)
Simple pendulum ℓ g T = 2π 2π ω 2 T 2π T = ℓ = g 2 2 2π = 10 g ℓ ω = Topic 4.1 ExtendedB – Pendulum system SHM THE SIMPLE PENDULUM What length of string would you use so the simple pendulum had a period of 2 seconds? Since then and Thus = 1.0132 m
Topic 4.1 ExtendedB – Pendulum system SHM THE PHYSICAL PENDULUM If, instead of a mass on a string we have an extended object which hangs from one end, we have a physical pendulum. For example, a meter stick hanging from a hole located 20 cm from its end is a physical pendulum. After analyzing the motion of a general physical pendulum we’ll come back to the meter stick example.
h o 0 c mgh I mgh I θ” = - θ α = - θ mg mgh I Where ω = Topic 4.1 ExtendedB – Pendulum system SHM THE PHYSICAL PENDULUM FYI: The weight acts from the cm. Consider the generalized physical pendulum. Point O is the axis, and Point C is the cm. The distance between O and C is h. The tension along the line h will not contribute to the torque, but the weight will. θ Στ = Iα hTsin0°+ hmgsinθ = Iα Iα = hmgsinθ Why? Why? FYI: Don’t forget: I = Icm+ mh2 θ” = -ω2θ
Physical pendulum 2π ω T = ω = Physical pendulum mgh I mgh I Where ω = I mgh T = 2π Topic 4.1 ExtendedB – Pendulum system SHM THE PHYSICAL PENDULUM To summarize the physical pendulum: θ(t) = θmsin(ωt + φ) θ(t) = θmcos(ωt + φ) and I = Icm+ mh2 Since then and
1 12 mL2 + mh2 mgh Icm+ mh2 mgh T = 2π T = 2π 1 12 12 + 0.302 9.8(.30) T = 2π I mgh T = 2π Topic 4.1 ExtendedB – Pendulum system SHM THE PHYSICAL PENDULUM Returning to the ruler problem, what is the predicted period? T = 1.526 s