SMART GOGGLES
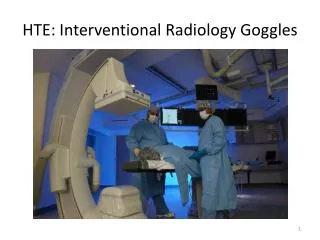
To Chong Ryan Offir Matt Ferrante James Kestyn Advisor: Dr. Tilman Wolf. SMART GOGGLES. Preliminary Design Review. Augmented Reality Goggle Application. An Example of Augmented Reality Goggle Application. Project Overview. Augmented reality vision technology

SMART GOGGLES
E N D
Presentation Transcript
To Chong Ryan Offir Matt Ferrante James Kestyn Advisor: Dr.Tilman Wolf SMART GOGGLES Preliminary Design Review
Augmented Reality Goggle Application An Example of Augmented Reality Goggle Application
Project Overview • Augmented reality vision technology • Sensing a user’s location and direction of view • Computing what to display in the user’s field of view • Displaying the visual content without obstructing the user’s view of real objects • Simple, efficient, and functional smart goggle • Sensor unit • Intel Atom Processor • Goggle-based display
Design Layout System Block Diagram
Conceptual System Design Bird’s eye view of the system design as worn
Hardware & Software Components • Sensor board • GPS • Gyroscope • Compass/Accelerometer • AVR microcontroller • Kalman filter • Intel Atom Processor – Tunnel Creek board • Windows Embedded 7 OS • OpenGL – API and graphical application • Goggle - Provided by Microvision, Inc. • VGA connection • Battery Pack – 12V Sense location and direction of view through a Kalman filter
Sensor Board • PCB • Size: 1 x 2.5 in • Consumes < 0.8 W @ 3.3 V • GPS - USART • Gyroscope, Compass, Accelerometer – I2C • USB-powered, 3.3V and 1.8V regulators • On-board 32-bit microcontroller • Design completed • Sending out this week
GPS – MN1010 • USART connection to the microcontroller • Determines the location of the user • Features: • 12-channel GPS receiver, RF filtering, flash memory • Operates at 1.8V @ 35mA • < 75 mW total power consumption • 10mm x 10mm x 2mm, 36 pin LGA packet • Outputs NMEA-0183 string @ 1 PPS • Frequency: 1575.42 MH
Gyroscope - L3G4200DTR • I2C bus connection to the microcontroller • Determines head orientation of the user • Features: • Operates at 3.3V @ 6.1mA • Three-axis angular rate sensor • X-axis: pitch axis • Y-axis: roll axis • Z-axis: yaw axis • 16 bit-rate value data output
Accelerometer/Compass - LSM303DLHC • Single I2C bus connection to the microcontroller • Accelerometer determines head movements • Compass determines the direction user is facing • Features: • 3.3V @ 0.11 mA • 3 magnetic field channels and 3 acceleration channels • From ±1.3 to ±8.1 gauss magnetic field full-scale • ±2g/±4g/±8g/±16g selectable full-scale • 3x5x1mm
AVR Microcontroller - AT32UC3B0256-Z2UT • High Performance, Low Power AVR®32 UC3 32-Bit Microcontroller • Executes > 1 MIPS / MHz • Universal Serial Bus (USB) Bootloader • Internal High-Speed SRAM, Single-Cycle Access at Full Speed: 96KB (256KB Flash) • Single Cycle Access up to 60 MHz • Single 3.3V Power Supply • Implements the Kalman Filter
Kalman Filter • A recursive predictive algorithm • Increases accuracy of noisy measurements • Measurements: Gyroscope, Accelerometer, Compass, GPS • Inputs: Measurements, Previous State of System, Bias Terms • Outputs (State Vector): Location, Orientation • Predicts the users location/orientation based on previous values, measurements, covariance, and noise
Intel Atom E680 – Tunnel Creek • Operates at 1.6GHz • Up to 2GB DDR2 • 1MB BIOS Flash, on-board reprogrammable • VGA port • USB port • 2 x SATA hard disk interface • 2 x 1000 BaseT Ethernet ports • Small size – 75 x 65mm (What is the size from Cornell????) • 6W power consumption (Cornell???) • Supply voltage: 5V (Cornell spec please!!!)
Software • Windows Embedded 7 OS • Develop 3D environment applicationwith OpenGL • OpenGL allows us to easily update graphical position • Translate users movement and orientation into a virtual environment to be used for 3D graphic application • API Development
Goggle-Based Display • VGA connection port • Input image projected on corrective lens • Semitransparent reflective lens • To be provided by Microvision, Inc. http://www.microvision.com
Battery • 12VDC battery pack
Proposed MDR Deliverables • Demonstrate the orientation of the Sensor Unit • Design a simple 3D environment using OpenGL • PC version