Download
1 / 15
180 likes | 383 Vues
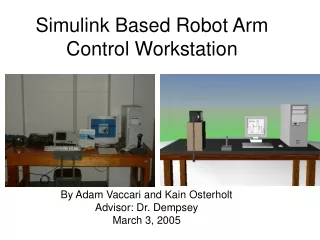
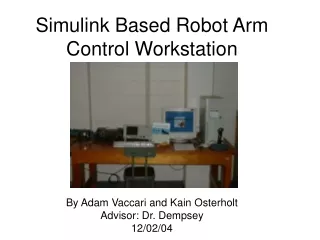
Development of ARM-based Embedded System for Robot Applications. 教授:曾慶耀 教授 學生:阮泓璋 學號: M97670020. OUTLINE. ABSTRACT INTRODUCTION STRUCTURE OF THE EMBEDDED SYSTEM SYSTEM FUNCTIONS AND DESIGN SOFTWARE DESIGN EXPERIMENT STUDIES CONCLUSION. Abstract. Based on embedded robot control systems

E N D
Development of ARM-based Embedded System for Robot Applications 教授:曾慶耀 教授 學生:阮泓璋 學號:M97670020
OUTLINE • ABSTRACT • INTRODUCTION • STRUCTURE OF THE EMBEDDED SYSTEM • SYSTEM FUNCTIONS AND DESIGN • SOFTWARE DESIGN • EXPERIMENT STUDIES • CONCLUSION
Abstract • Based on embedded robot control systems • ARM • DSP • ARM-LINUX • Design of embedded control system • System structure • Functions • Hardware • Software design
INTRODUCTION • Application of robots • Outer space exploration • Ocean resource exploitation • Two parts of robots • Mechanical body • Control system
STRUCTURE OF THE EMBEDDED SYSTEM • Embedde system • Functions • Reliability • Cost • Size • Power consumption
The characteristics of embedded systems • Software • Closely relative to the hardware • High efficiency • High reliability • FLASH • Hardware • Small size and high integration • Low power consumption • Fine electromagnetic compatibility performance
SYSTEM FUNCTIONS AND DESIGN • Main purpose of multi- robots • Size • Weight • Power consumption
Hardware Architecture • Robot • S3C2410(ARM920T) • MMU • AMBA • APB • AHP • Harvard cache architecture
Module Function and Design • Kernel • Device Manager • Graphic Windowing and Events Subsystem • Communication • Memory • Service
SOFTWARE DESIGN • Transplant OS • Driver • API • Disassemble and design multitasks • Control algorithms
CONCLUSION • Advantage • Reliability • Real-time • General-purpose capability • Weakness • Control arithmetic • Functions • Decision independently