Wireless Positioning System
This guide explores sensor options for a robot lawn mower, focusing on acoustic GPS for precise positioning. Traditional GPS, while popular, is limited in accuracy. Alternatives like corrected GPS and video sensors involve complexities and costs. Acoustic GPS offers high accuracy (~1 inch) at a reasonable price, making it a suitable choice. The system requires specific components such as RF transmitters and acoustic sensors, allowing the robot to triangulate its position effectively. With proper setup, interference management, and programming, this approach can yield reliable results for robotic lawn mowing.

Wireless Positioning System
E N D
Presentation Transcript
Wireless Positioning System Compiled by Austin Stoker ECE 5320 Spring 2012 Dr. Chen
I want a robot lawn mower but I don’t want to bury a wire. What sensor could I use?
GPS • Only accurate to a few meters. • Small (1cmx1cmx.2cm) • Cheap ($3-$30) Image from Wikipedia/GPS Dimensions and prices http://www.semiconductorstore.com/cart/pc/viewprd.asp?idProduct=42046
Corrected GPS • Expensive • Requires base station. • Note: By 2020 (probably sooner) new GPS satellites will make 10cm GPS as cheap as 10m GPS is today.
Video Sensors • Complex to implement • Not highly reliable
Acoustic GPS • Accurate. (~1 inch) • Fairly easy to implement • Cheap • Only works within setup area • Requires programming • Requires assembly
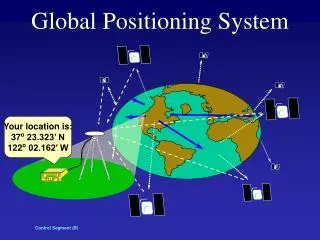
How APS works Measuring the time in takes to receive a sound signal from 3 different beacons with known locations the sensor can triangulate it’s location. With only 2 bases the position can be found if the robot is supposed to be within the bounds of the bases. Base #1 Base #2 Base #3
How APS works (cont.) • The robot sends a request via RF transmitter. • The RF request is encoded for a specific base. The base responds with a uniquely modulated audio transmission. This is repeated for each base.
How APS works (cont.) • The robot times the response time of each signal. Calculates the distance to each base and triangulates it’s position.
Parts • Acoustic sensor/transmitters • Murata MA40S4S/R • $10 each Prices from www.mouser.com/
Parts • Computation board • Microchip dsPIC 30F401 • $7 Prices from www.mouser.com
Parts • RF transmitters/reciever • EasyRadio ~$20-$40 www.active-robots.com/
How to use • Accuracy of 1cm or less has been shown. Plenty good for a lawn mower if it is equipped with touch sensors for curbing and such.
How to use • Avoid interference noise of 40kHz
How to use • Allow enough time between requesting from station 1 and station 2. At least 30ms per meter of diameter of lawn.
Calculations http://www.ias.uwe.ac.uk/~a-winfie/Bjerknes_etal_TAROS07.pdf
Details • Since the beacons positions are known S is known • It is simple from the knowledge of the position of the beacons to calculate the h and y and thus pinpoint the location of the robot. http://www.ias.uwe.ac.uk/~a-winfie/Bjerknes_etal_TAROS07.pdf
Details Make sure the beacons respond without overlapping http://www.ias.uwe.ac.uk/~a-winfie/Bjerknes_etal_TAROS07.pdf
How accurate? http://www.ias.uwe.ac.uk/~a-winfie/Bjerknes_etal_TAROS07.pdf
Z accuracy in 3D • Z axis accuracy