Transformations and Euler Angles
Transformations and Euler Angles. Sebastian van Delden USC Upstate svandelden@uscupstate.edu. Homogeneous Transformations. A 4x4 matrix that represents general transformations. Transformation Equations. Consider the following transformations:

Transformations and Euler Angles
E N D
Presentation Transcript
Transformations and Euler Angles Sebastian van Delden USC Upstate svandelden@uscupstate.edu
Homogeneous Transformations • A 4x4 matrix that represents general transformations.
Transformation Equations • Consider the following transformations: • Notice that {D} can be expressed in two different ways.
Transformation Equations cont… • A typical use of transformation equations:
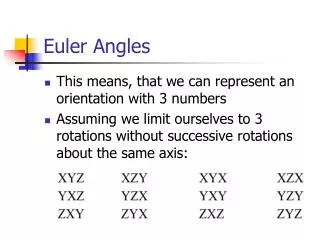
More on Rotation Matrices • Rotation matrices can also be represented as follows. • The significance is that only 3 parameters are needed to specify an orientation … even though a rotation matrix has 9 values.
More on Rotation Matrices • There are 6 dependencies in a rotation matrix.
More on Rotation Matrices • For example, given the following homogeneous transformation, find the missing values.
Representing A General Orientation • A rotation matrix that represents any possible orientation can be created by multiplying 3 pure axis rotation matrices together. • Also, recall that matrix multiplication don’t usually commute.
X – Y – Z Fixed Angles cont… • The inverse problem:
Z – Y – X Euler Angles • Rotations are performed around the moving axes:
Z–Y–X Euler versus X-Y-Z Fixed • They are the same… Conceptually the difference is in the order that the matrix multiplications are made… • Do example: • RXYZ(90,90,90) • RZ’Y’X’(90,90,90)
Other Conventions • 12 conventions for Fixed Angle, 12 for Euler Angle. • Because of duality, 12 unique conventions in total. • 3 x 2 x 2 combinations: • X Y Z • X Y X • X Z X • … • Staubli’s V+ Machines use Z-Y-Z Euler • Staubli’s VAL3 Machines use X-Y-Z Euler • Fanuc TPP Machines use X-Y-Z Fixed