Euler Angles
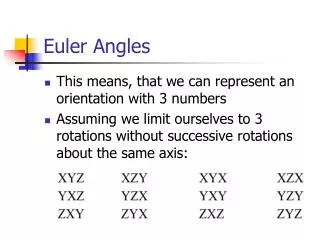
Euler Angles. A rotation matrix can be described with three free parameters. Select three separate rotations about body axes Rotation of f about e 3 axis. Rotation of q about e 1 axis. Rotation of y about e 3 axis. These are the Euler angles. Three Angles. e 3. q. e 2. e 1.

Euler Angles
E N D
Presentation Transcript
A rotation matrix can be described with three free parameters. Select three separate rotations about body axes Rotation of f about e3 axis. Rotation of q about e1 axis. Rotation of y about e3 axis. These are the Euler angles. Three Angles e3 q e2 e1 f y
Any vector z can be rotated though the Euler angles. Equivalent matrix operation is the product of three separate operations. Euler Matrices
Full Rotation • Any rotation is then expressed with the three angles.
The terms in the W matrix correspond to the components of the angular velocity vector. The relationship between angular velocity and Euler angles comes from the S matrix. Matching Terms
The angular velocity in the body frame can be expressed in terms of Euler angles. Body Frame x3 x2 x1