Biomechanical Tissue Stimulator
230 likes | 277 Vues
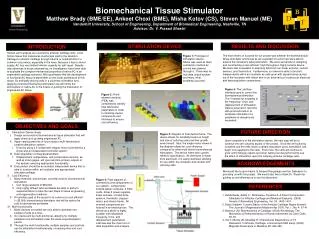
Biomechanical Tissue Stimulator. Group 1: Matt Brady (BME/EE) Ankeet Choxi (BME) Misha Kotov (CS) Steven Manuel (ME) Adviser: Dr. V. Prasad Shastri. Overview.

Biomechanical Tissue Stimulator
E N D
Presentation Transcript
Biomechanical Tissue Stimulator Group 1: Matt Brady (BME/EE) Ankeet Choxi (BME) Misha Kotov (CS) Steven Manuel (ME) Adviser: Dr. V. Prasad Shastri
Overview • Design device that mimics physiological cyclic compressive loading to induce growth repair and remodeling mechanisms during tissue culture of articular cartilage
What are we stimulating? • Articular cartilage • covers human joint surfaces • transfers mechanical load to skeletal system • makes up ~2% of tissue volume in human body
Persistent medical problems • Limited ability to self-repair • avascular • Osteoarthrosis and related problems very common • 100,000 AC injuries annually • Arthritis 2nd most common US disability • $86 billion in medical expenses annually • 21% of adults in US diagnosed with arthritis • Very marketable project
Why stimulate culturing cartilage? • Hypothesized that mechanically stimulated cartilage will grow more like in vivo cartilage • Increased formation of cartilage matrix, stronger • Type II collagen • Glycosaminoglycan(GAG)
Past Work • Ongoing cell-culture research project • Prototype of stimulator has been constructed • Many problems incurred • Much research done for design of new device • Range of force • Sensors • Detection and environment
Current Work • Waiting on sensors, driver, and power supply to arrive • Finishing up milling of our device frame and constructing our frame. • Continuing to write pseudo-code until all of our parts arrive.
Design Parameters • Accuracy of 20 microns • Stimulation frequency of 1 Hz max • Max load of 1 MPa or 100 N per sample • 12 wells at once • Max in-test stroke of 1 mm • Total sample size of 10 mm • 100 percent humidity at 98°F • Use multiple waveforms for stimulation
Finite Element Analysis • Completed finite element analysis and finalized fabrication parameters
Contact Sensor • Made significant progress toward an easy to fabricate custom contact sensor
Power Supply DAQ Card Driver computer Displacement Sensors Contact Sensors Tissue Stimulator
Programming objectives • Program an application provide the following: • Control the stepper motor • Initialize and calibrate the sensors • Establish a baseline for measurements • Gather relevant data
Application considerations • Precise motion control for the motor • Display the baseline displacement where contact is made with all wells; record measurements in reference to this point • Ideally, allow for customized routines, be able to save and repeat procedures • Update experiment figures in real time • Provide exception handling routines • Communication with standalone control unit
Current Work on Programming • Working to modify some pre-programmed modules to control stepper motor • Contacted our assigned application engineer from National Instruments • Set up the DAQ card and installed relevant software • Working on building application
DAQ Card Reads data from the motor and sensors Keeps timing of device Outputs the step and direction into the driver which runs the motor Runs off LabView
Motor Driver Driver takes inputs from the DAQ card and relays them to the motor Allows fractional stepping of motor Provides current limiting to keep motor from getting too hot and drawing too much power
Power Supply Regulated 27V so motor runs at optimal current Connects to driver, which in turn powers motor Powers other components as well, however, resistors need to be used to lower voltage.
Displacement Sensor Linear Encoder Will output measurements of displacement Needed to determine amount of strain applied to each tissue sample Used as a tilt sensor (3 sensors)
Future Work • Finishing milling and construction of device frame. • Program common compatibility of motors, sensors, drivers, and power supply. • Begin phase testing with sensors and other components
Summary • Articular cartilage and problems • Biomechanical tissue stimulator • Mechanically stimulates cartilage • Promotes growth of tissue • Design, considerations
End Goals • End Goal of Overall Project • To develop implantable artificial cartilage to replace damaged articular cartilage in the body. • End Goal of Senior Design Project • To develop device that mimics mechanical load placed on growing cartilage through controlled experimental stimulation.
References Aufderheide, Adam C., Athanasiou, Kyriacos A. A Direct Compression Stimulator for Articular Cartilage and Meniscal Explants. (2006) Annals of Biomedical Engineering, Vol. 34. 1463-1474 Bobic,Vladimir. Current Status of the Articular Cartilage Repair biomed: The Journal of Regenerative Medicine Apr 2000, Vol. 1, No. 4: 37-41 Mansour JM. Biomechanics of Cartilage. (2004) Kinesiology: The Mechanics & Pathomechanics of Human Movement by Carol Oatis. 66-79. Xia Y, Moody JB, Alhadlaq H. Orientational Dependence of T2 Relaxation in Articular Cartilage: a microscopic MRI study. (2002) Magnetic Resonance in Medicine 48: 460-469