ROAM Control System
ROAM Control System. Uwe Rosebrock, Gary Carroll Software Engineers & Scientific Programmers March 2009 CSIRO Marine and Atmospheric Research. In the beginning there was a plan …. ROAM Control System.

ROAM Control System
E N D
Presentation Transcript
ROAM Control System Uwe Rosebrock, Gary Carroll Software Engineers & Scientific Programmers March 2009 CSIRO Marine and Atmospheric Research
In the beginning there was a plan … ROAM Control System March, 2009
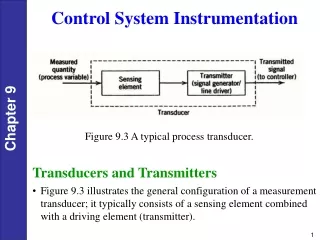
ROAM Control System • The Relocatable Ocean and Atmosphere Model (ROAM) is an operational product for predicting ocean temperatures, salinity, currents and sea-level in an user-specified domain • The system is largely automated, with user interaction restricted to a graphical user interface • The ROAM software is designed to allow the user to: • Graphically specify the model domain • Control the execution of the models available (Coordinate and manage the routine acquisition of global data from a data server) ROAM Control System March, 2009
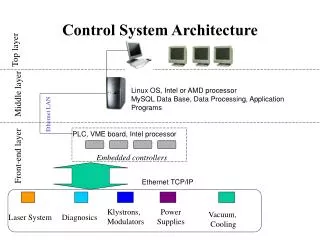
ROAM Control System architecture ROAM Control System DATA server Run Specification Framework - GUI Run Coordination System Data download and registration DS Model Execution Managers Data Management Framework Atmospheric Models Ocean Models DS Hydrodynamic Wave DS -> Data Store -> Relational Database ROAM Control System March, 2009
ROAM Run Specification Framework ROAM Control System DATA server Run Specification Framework - GUI Run Coordination System Data download and registration DS • Define, control and monitor runs • Define spatial & temporal parameters. Model Execution Managers Data Management Framework Atmospheric Models Ocean Models DS Hydrodynamic Wave DS -> Data Store -> Relational Database ROAM Control System March, 2009
ROAM Run Coordination Framework ROAM Control System DATA server Run Specification Framework - GUI Run Coordination System Data download and registration DS • Manage and Monitor current and historic runs. • Coordinate the scheduling and dispatching of runs. Model Execution Managers Data Management Framework Atmospheric Models Ocean Models DS Hydrodynamic Wave DS -> Data Store -> Relational Database ROAM Control System March, 2009
ROAM Retrieving operational data ROAM Control System DATA server Run Specification Framework - GUI Run Coordination System Data download and registration DS • Download operational data from the data provider. • Register the data with DMF. Model Execution Managers Data Management Framework Atmospheric Models Ocean Models DS Hydrodynamic Wave DS -> Data Store -> Relational Database ROAM Control System March, 2009
ROAM Data Management Framework ROAM Control System DATA server Run Specification Framework - GUI Run Coordination System Data download and registration DS • Manage datasets. • translate dataset into formats required by models. Model Execution Managers Data Management Framework Atmospheric Models Ocean Models DS Hydrodynamic Wave DS -> Data Store -> Relational Database ROAM Control System March, 2009
ROAM Model Execution Framework ROAM Control System DATA server Run Specification Framework - GUI Run Coordination System Data download and registration DS • Acquire and prepare data for run. • Prepare, execute and monitor model. • register output with DMF. Model Execution Managers Data Management Framework Atmospheric Models Ocean Models DS Hydrodynamic Wave ROAM Control System March, 2009
Communication Currently ‘Point to Point’ communication, soon Peer based communication allowing further decoupling of components and concurrency (distributed MEM’s providing specialized capability i.e. ROMS) ROAM Control System March, 2009
Data products currently utilized • Forcing data for Models: • Ocean maps • OFAM Forecast • Near-Real-Time analysis • Behind-Real-Time analysis • LAPS • GASP • SST (GHRSST) • TC BOGUS • WAM Regional Forecast / WAM Australian meso-scale forecast • BRAN (hind cast) ROAM Control System March, 2009
ROAM User and Remote Control Interface ROAM Control System March, 2009
ROAM User and Remote Control Interface • The user interface supports: • Creating and scheduling a new model run • Monitoring a model run • Aborting a model run • Deleting a model run and all its contextual information • Viewing statistics of some model runs • Managing user privileges and preferences • Graphical selection of a model domain • Provide access to the data produced by the models • Select extraction of subsets of the forcing data ROAM Control System March, 2009
ROAM User and Remote Control Interface • The user interface can: • Run on any major platform (MS Windows, Linux, MacOSX) • Connect to the Run Control Framework from anywhere given access to the relevant network • Support multiple concurrent connection. • Support role based access control ROAM Control System March, 2009
GUI components • Run summary monitor. Shows the summary status information about currently executing runs and recently completed runs. • Detailed run monitor. Detailed run information about the currently selected run, and some limited controls. • System messages. A panel displaying information, warning and error messages about currently executing runs. • Run management. Manages the creation and editing of runs. • Run groups. Manages the creation and editing of run groups. • Preferences. Permits editing of user settings, and control of system alerts. • Administration. User and privilege management. • Alerts. Alert notification management. ROAM Control System March, 2009
ROAM User and Remote Control Interface In Detail ROAM Control System March, 2009
ROAM User and Remote Control Interface Run Summaries • Displays the status of historical, scheduled and executing runs • Runs are sorted, grouped and colour-coded according to the value of the first column • Select run (highlighted in blue) to see more details in the Detailed run monitor ROAM Control System March, 2009
ROAM User and Remote Control Interface Run Details • Run Specification • Describes the model settings and run-time parameters • Displays the model grid as a graphical inset. More detailed view of grid appears on mouse over. ROAM Control System March, 2009
ROAM User and Remote Control Interface Run Details • Run status • Describes the execution status of the selected run • Detailed execution messages are displayed in separate tabs for each model. • All messages are time-stamped and colour-coded to indicate the importance of the message. ROAM Control System March, 2009
ROAM User and Remote Control Interface Run Details • Run statistics • Provides a quick visual assessment of how well the model performed and whether the statistics are within a tolerable range • The model variables, reference heights and colour ranges are displayed • The 10th, 50th and 90th percentiles statistics for each variable and reference height are drawn on top of a 'traffic light indicator'. • Provide references to the designated Output. ROAM Control System March, 2009
Messages generated by the system to indicate run progress • Transient. Stored in application cache • Time-stamped and colour coded according to importance Informational. Minor message. Significant. Important message (e.g. run started, run aborted). Warning. A potential error (e.g. forcing data is unavailable). Error. Indicates that a fatal error occurred while trying to run the model. ROAM User and Remote Control Interface In Detail ROAM Control System March, 2009
Run management • The Run Editor is used to define the run parameters, model parameters and the grid definition • All runs are stored in the RCF database • Runs can be repeated based on previous runs • Run templates can be created to maintain domain information • The model combination can be selected • Defining a run is laid out as a step by step process ROAM Control System March, 2009
Run Editor • Run name is set to the forecast start time. • The Atmosphere, Ocean, and Wave option toggles excluding or including the respective model. • Forecast period can be 1, 2, 3, 5, or 7 days. ROAM Control System March, 2009
Run Editor • Shows details of selected grid. • Define parameters: origin, resolution, aspect ratio, number of cells. • Visual feedback as to whether the run estimate is within the tolerable range. • Depending on which group of models are selected, tabs show the dependent grids. ROAM Control System March, 2009
Ocean grids is defined inside the atmospheric grid • Grid can be extended a long a boundary and shifted using the grid handles. Toolbar buttons allow for zoom in, zoom out, rapid zoom out, pan and print. Graphical Grid Editor ROAM Control System March, 2009
Depth and height contours can be modified (in intervals of 100m) by using slider or up/down keys. • The Coarse runtime estimate gives an indication of how long the run will take, based on previous historical runs. • Refined runtime estimate uses the model specifications to compute a more accurate runtime. • Clicking the ‘Get estimate’ button gives a graphical representation of the refined runtime estimate in hours. Graphical Grid Editor ROAM Control System March, 2009
Run scheduling options • Options for setting execution start time • None • Immediate • Start after completion of a specific run • User specified time • Option to repeat a run every 12 or 24 hours • Run priority – low, medium, high ROAM Control System March, 2009
Run Summary The summary panel displays the details for all submitted models. This step is not required for submitting runs. ROAM Control System March, 2009
ROAM Overview • The Relocatable Ocean and Atmosphere Model (ROAM) is an operational product for predicting atmospheric an oceanic properties in an user-specified domain • The system is largely automated, with user interaction restricted to a graphical user interface • The ROAM software is designed to allow the user to: • Graphically specify the model domain • Control the execution of the models available • Retrieve the output of successful runs automatically through dedicated upload Break ROAM Control System March, 2009
Where to in the short term… • The ROAM team is currently; • incorporating more models (i.e NearCom) • incorporating more data streams (i.e.Global SST) • enable expert users to customize the combination of forcing • enable expert users to customize general parameters of a specific model • enable expert users to create ensembles of runs (i.e. for parameter estimation) ROAM Control System March, 2009
… in the mid term • With establishing IMOS and EMII, • it is expected that a variety of data will be made available via OpenDAP server also providing access to meta data, given the currently being implemented standards; • ROAM could be able to discover the latest published data and utilize it to force models, • Create ensembles of comparative model runs over the same domain using distributed data streams, • and much more... • Later this year, • ROAM will be moving to a peer driven and capability based communication model, as a result ROAM becomes truly distributed! ROAM Control System March, 2009