Download
1 / 1
10 likes | 252 Vues
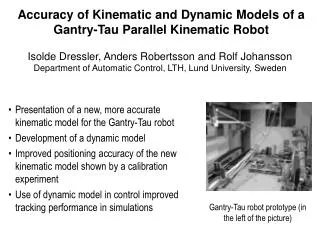
Accuracy of Kinematic and Dynamic Models of a Gantry-Tau Parallel Kinematic Robot. Isolde Dressler, Anders Robertsson and Rolf Johansson Department of Automatic Control, LTH, Lund University, Sweden. Presentation of a new, more accurate kinematic model for the Gantry-Tau robot

E N D
Accuracy of Kinematic and Dynamic Models of a Gantry-Tau Parallel Kinematic Robot Isolde Dressler, Anders Robertsson and Rolf Johansson Department of Automatic Control, LTH, Lund University, Sweden • Presentation of a new, more accurate kinematic model for the Gantry-Tau robot • Development of a dynamic model • Improved positioning accuracy of the new kinematic model shown by a calibration experiment • Use of dynamic model in control improved tracking performance in simulations Gantry-Tau robot prototype (in the left of the picture)