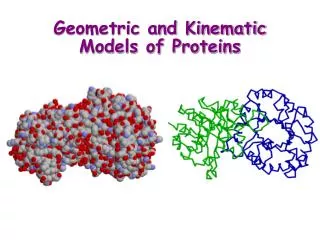
Kinematic and Geometric Models of Proteins: Insights from a Multisite Course
560 likes | 674 Vues
This lecture delves into the geometric and kinematic models of proteins, emphasizing their atomistic structures in 3D space. It covers fundamental principles such as peptide bonding and kinematic chains, vital for understanding protein configurations. The atomistic model's limitations and the necessity for maintaining appropriate bond lengths in kinematic structures are discussed. Key features like molecular weight, amino acid frequency, and folding energy are also analyzed. This session, part of an ongoing course taught across various prestigious institutions, aims to deepen the understanding of protein dynamics in biochemistry.

Kinematic and Geometric Models of Proteins: Insights from a Multisite Course
E N D
Presentation Transcript
Geometric and Kinematic Models of Proteins LECT_4 8th Oct 2007 From a course taught firstly in Stanford by JC Latombe, then in Singapore by Sung Wing Kin, and now in Rome by AG…web solidarity. With excerpta from a course by D. Wishart.
(x4,y4,z4) (x5,y5,z5) (x6,y6,z6) (x8,y8,z8) (x7,y7,z7) (x1,y1,z1) Kinematic Models of Bio-Molecules • Atomistic model: The position of each atom is defined by its coordinates in 3-D space (x3,y3,z3) (x2,y2,z2) p atoms 3p parameters Drawback: The bond structure is not taken into account
Peptide bonds make proteins into long kinematic chains The atomistic model does not encode this kinematic structure ( algorithms must maintain appropriate bond lengths)
Protein Features ACEDFHIKNMF SDQWWIPANMC ASDFDPQWERE LIQNMDKQERT QATRPQDS... Sequence View Structure View
Where To Go** http://www.expasy.org/tools/
Compositional Features • Molecular Weight • Amino Acid Frequency • Isoelectric Point • UV Absorptivity • Solubility, Size, Shape • Radius of Gyration • Free Energy of Folding
Kinematic Models of Bio-Molecules • Atomistic model: The position of each atom is defined by its coordinates in 3-D space • Linkage model: The kinematics is defined by internal coordinates (bond lengths and angles, and torsional angles around bonds)
T? T? Linkage Model
Issues with Linkage Model • Update the position of each atom in world coordinate system • Determine which pairs of atoms are within some given distance(topological proximity along chain spatial proximitybut the reverse is not true)
z T(x) y T x x Rigid-Body Transform
y x 2-D Case
y y x x 2-D Case
y y x x 2-D Case
y y x x 2-D Case
y y x x 2-D Case
y y x x 2-D Case
y y Rotation matrix: cos q -sin qsin qcos q j i q ty tx x x 2-D Case
y y Rotation matrix: i1 j1i2j2 j i q ty tx x x 2-D Case
y y Rotation matrix: a i1 j1i2j2 a b j i = b’ q ty a’ b’ b q a tx a a’ x x 2-D Case v Transform of a point?
y y y’ q y ty x’cos q -sin qtxx tx + x cosq – y sin q y’ = sin q cos qtyy = ty + x sin q + y cos q 1 0 0 1 1 1 x x’ tx x x Homogeneous Coordinate Matrix i1 j1txi2 j2ty 0 0 1 • T = (t,R) • T(x) = t + Rx
? q2 q1 3-D Case
R z y x y i z j k x Homogeneous Coordinate Matrix in 3-D i1 j1 k1txi2 j2 k2tyi3 j3 k3tz 0 0 0 1 with: • i12 + i22 + i32 = 1 • i1j1 + i2j2 + i3j3 = 0 • det(R) = +1 • R-1 = RT
z y x Example cos q 0 sinq tx 0 1 0 ty -sin q 0 cos q tz 0 0 0 1 q
k q Rotation Matrix R(k,q)= kxkxvq+ cqkxkyvq- kzsqkxkzvq+ kysq kxkyvq+ kzsqkykyvq+ cqkykzvq- kxsq kxkzvq- kysqkykzvq+ kxsqkzkzvq+ cq where: • k = (kx ky kz)T • sq = sinq • cq = cosq • vq = 1-cosq
z y x y i z j k x x’ i1 j1 k1 txx y’ i2 j2 k2 tyy z’ i3 j3 k3 tzz 1 0 0 0 1 1 = Homogeneous Coordinate Matrix in 3-D (x,y,z) (x’,y’,z’) Composition of two transforms represented by matrices T1 and T2 : T2T1
Building a Serial Linkage Model • Rigid bodies are: • atoms (spheres), or • groups of atoms
Building a Serial Linkage Model • Build the assembly of the first 3 atoms: • Place 1st atom anywhere in space • Place 2nd atom anywhere at bond length
Building a Serial Linkage Model • Build the assembly of the first 3 atoms: • Place 1st atom anywhere in space • Place 2nd atom anywhere at bond length • Place 3rd atom anywhere at bond length with bond angle
z x y Coordinate Frame -1 0 Atom: -2
Building a Serial Linkage Model • Build the assembly of the first 3 atoms: • Place 1st atom anywhere in space • Place 2nd atom anywhere at bond length • Place 3rd atom anywhere at bond length with bond angle • Introduce each additional atom in the sequence one at a time
z x y 1 0 0 0cb -sb0 0 1 0 0 d 0 ct -st 0 sbcb 0 0 0 100 0 st ct 0 0 0 1 0 0 010 0 0 0 1 0 0 0 1 0 0 0 1 Ti+1 = Bond Length -1 1 0 -2
z x y 1 0 0 0cb -sb0 0 1 0 0 d 0 ct -st 0 sbcb 0 0 0 100 0 st ct 0 0 0 1 0 0 010 0 0 0 1 0 0 0 1 0 0 0 1 Ti+1 = Bond angle
z x y 1 0 0 0cb -sb0 0 1 0 0 d 0 ct -st 0 sbcb 0 0 0 100 0 st ct 0 0 0 1 0 0 010 0 0 0 1 0 0 0 1 0 0 0 1 Ti+1 = Torsional (Dihedral) angle
z x y 1 0 0 0cb -sb0 0 1 0 0 d 0 ct -st 0 sbcb 0 0 0 100 0 st ct 0 0 0 1 0 0 010 0 0 0 1 0 0 0 1 0 0 0 1 Ti+1 = Transform Ti+1 y i+1 Ti+1 z x t i-1 d i b i-2
z x y 1 0 0 0cb -sb0 0 1 0 0 d 0 ct -st 0 sbcb 0 0 0 100 0 st ct 0 0 0 1 0 0 010 0 0 0 1 0 0 0 1 0 0 0 1 Ti+1 = Transform Ti+1 y i+1 Ti+1 z x t i-1 d i b i-2
Readings: J.J. Craig. Introduction to Robotics. Addison Wesley, reading, MA, 1989. Zhang, M. and Kavraki, L. E.. A New Method for Fast and Accurate Derivation of Molecular Conformations. Journal of Chemical Information and Computer Sciences, 42(1):64–70, 2002.http://www.cs.rice.edu/CS/Robotics/papers/zhang2002fast-comp-mole-conform.pdf
Serial Linkage Model T1 0 1 T2 -1 -2
Relative Position of Two Atoms Ti+2 k-1 Ti+1 i+1 Tk k i Tk(i) = Tk …Ti+2 Ti+1 position of atom k in frame of atom i
Update • Tk(i) = Tk…Ti+2 Ti+1 • Atom j between i and k • Tk(i) = Tj(i)Tj+1Tk(j+1) • A parameter between j and j+1 is changed • Tj+1 Tj+1 • Tk(i) Tk(i) = Tj(i)Tj+1 Tk(j+1)
Why? Tree-Shaped Linkage Root group of 3 atoms p atoms 3p -6 parameters
T0 world coordinate system Tree-Shaped Linkage Root group of 3 atoms p atoms 3p -6 parameters
Simplified Linkage Model In physiological conditions: • Bond lengths are assumed constant [depend on “type” of bond, e.g., single: C-C or double C=C; vary from 1.0 Å (C-H) to 1.5 Å (C-C)] • Bond angles are assumed constant[~120dg] • Only some torsional (dihedral) angles may vary • Fewer parameters: 3p-6 p-3
f C C N Ca 3.8Å Bond Lengths and Angles in a Protein w: Ca Ca f: C C y: N N w = p w
peptide group side-chain group f-y Linkage Model
C C N Ca f=0 Convention for f-y Angles • f is defined as the dihedral angle composed of atoms Ci-1–Ni–Cai–Ci • If all atoms are coplanar: • Sign of f: Use right-hand rule. With right thumb pointing along central bond (N-Ca), a rotation along curled fingers is positive • Same convention for y C Ca N C f=p
Ramachandran Maps They assign probabilities to φ-ψ pairs based on frequencies in known folded structures ψ φ
The sequence of N-Ca-C-… atoms is the backbone (or main chain) Rotatable bonds along the backbone define the f-y torsional degrees of freedom Small side-chains with c degree of freedom c c c c c Cb Ca f-y-c Linkage Model of Protein
Side Chains with Multiple Torsional Degrees of Freedom (c angles) 0 to 4 c angles: c1, ..., c4