Download
1 / 2
20 likes | 120 Vues
This project uses a motion border detect test to signal an empty parking spot, with a Foscam FI8904W camera for image capture and transfer. Developed by a team of 10 members with expertise in hardware and software.

E N D
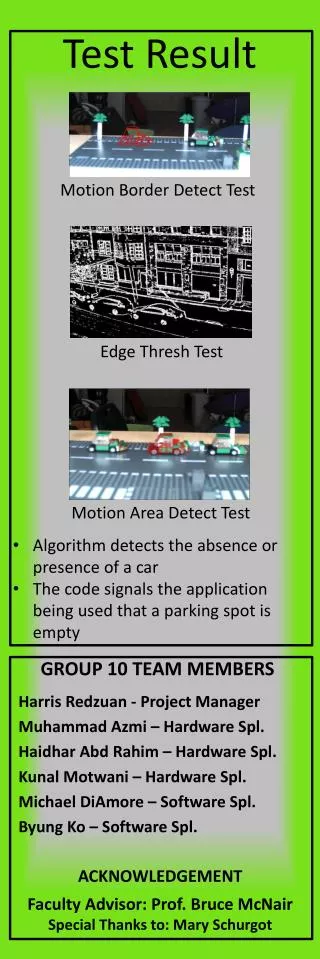
Test Result Motion Border Detect Test Edge Thresh Test Motion Area Detect Test • Algorithm detects the absence or presence of a car • The code signals the application being used that a parking spot is empty GROUP 10 TEAM MEMBERS Harris Redzuan - Project Manager Muhammad Azmi – Hardware Spl. HaidharAbd Rahim – Hardware Spl. KunalMotwani – Hardware Spl. Michael DiAmore – Software Spl. ByungKo – Software Spl. Acknowledgement Faculty Advisor: Prof. Bruce McNair Special Thanks to: Mary Schurgot
Hardware Software Foscam FI8904W Outdoor Wireless/Wired IP Camera • Specification • Weatherproof • Auto IR-LED illumination up to 20 meters • Wired & Wi-Fi compliant, 802.11 b/g • 3.6mm focal point (67 degrees viewing angle) • Resolution: 640 x 480 • Implementation • Installed at rooftop of a building • Capture an image every 30 sec • Transfer the image to a computer using Cat5 Ethernet Cable or wireless Microsoft Visual C# 2010 • Computer Vision/Image processing • Input: an image • Output: either an image or a set of a parameters related to the image • Options for what can be detected: • Color • Shape (edge detection) • Depth (focal depth within image) Interface